

Multi-functional auxiliary arm self-balancing mechanical exoskeleton
A technology of auxiliary machinery and exoskeleton, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of few human safety measures, safety improvement, and poor fit, so as to increase the weight of heavy objects that can be transported , Prevent impact damage, simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
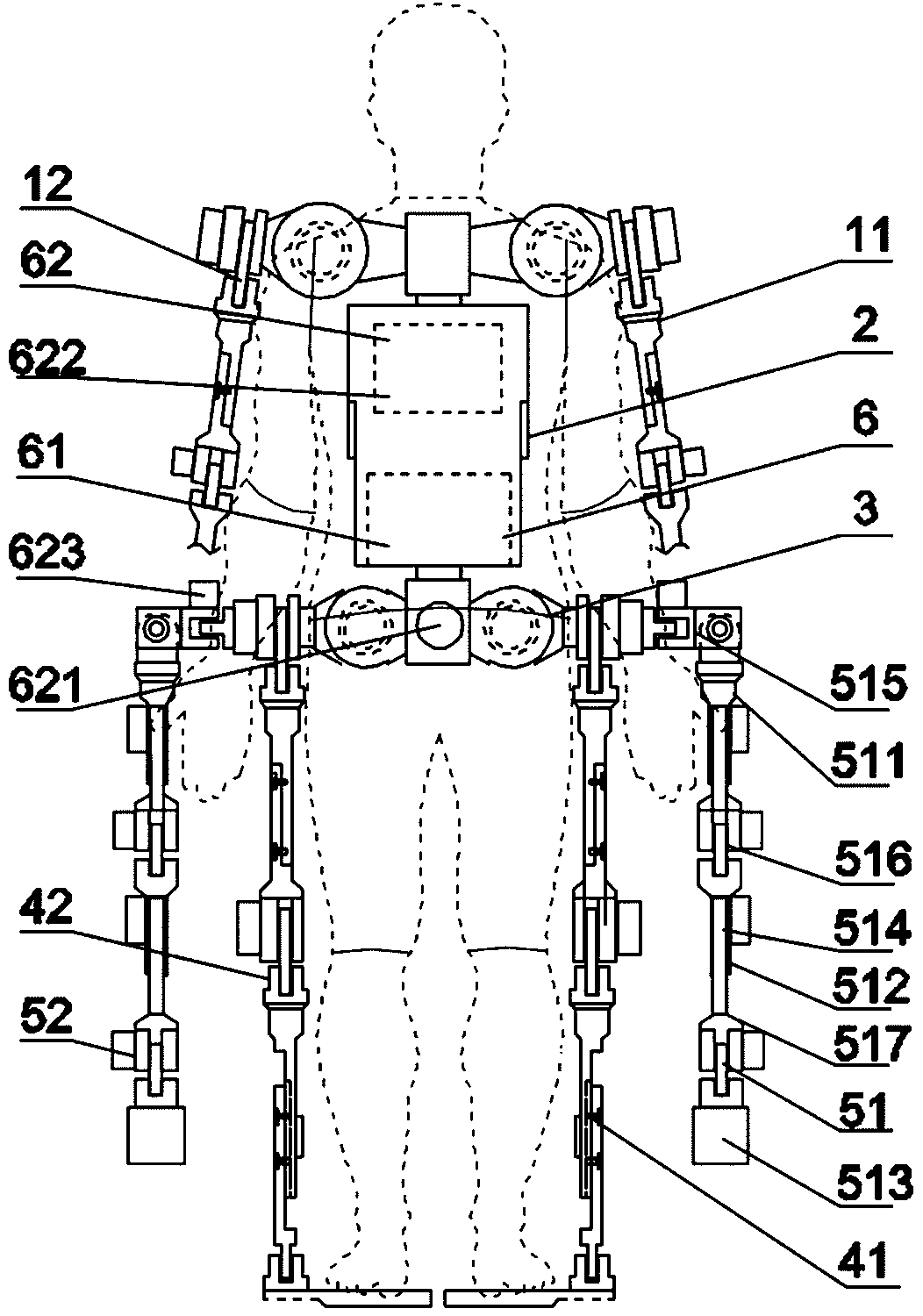
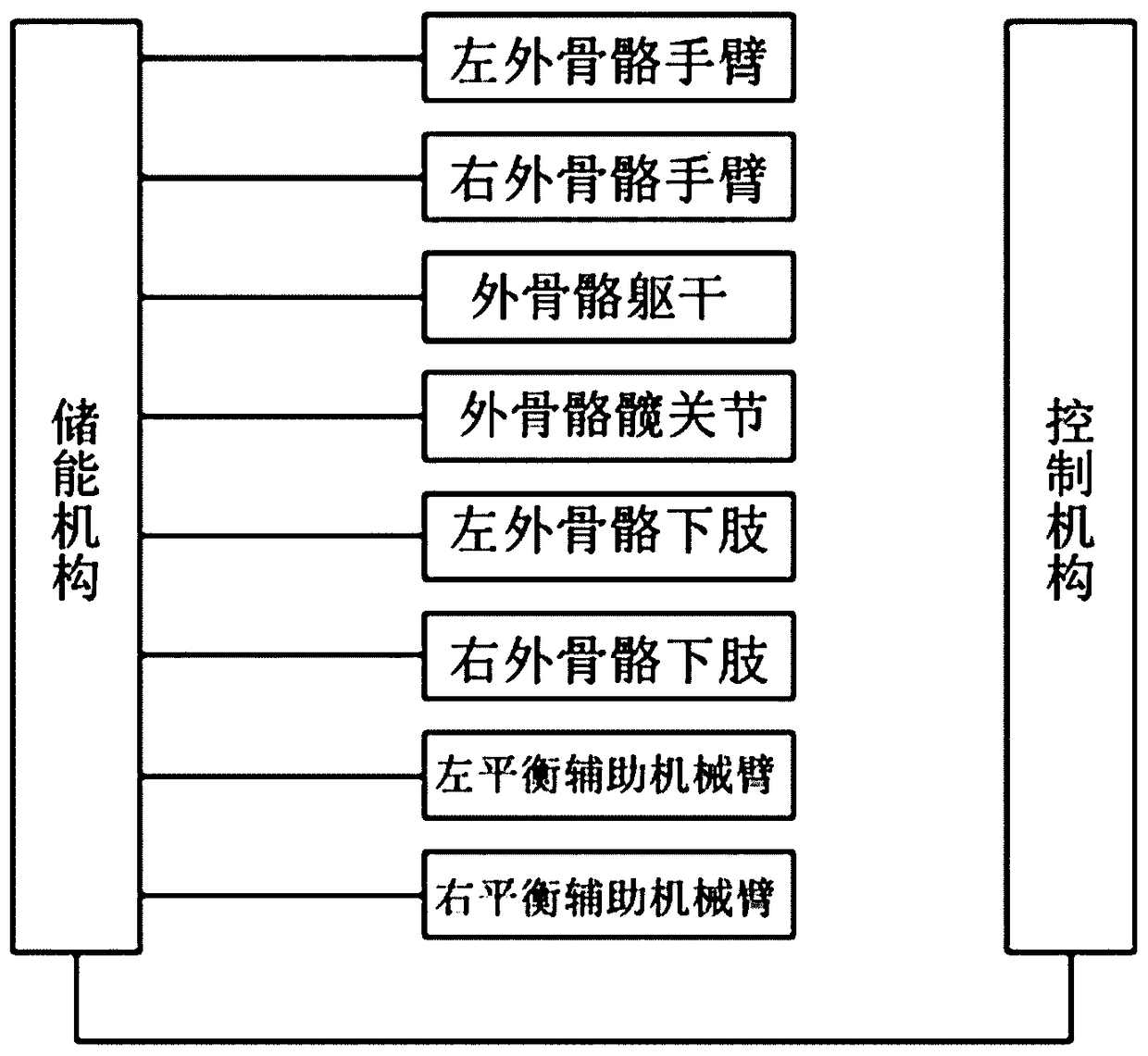
[0027] refer to figure 1 and figure 2, a multifunctional auxiliary arm self-balancing mechanical exoskeleton, comprising a left exoskeleton arm 11 and a right exoskeleton arm 12, the left exoskeleton arm 11 and the right exoskeleton arm 12 are respectively connected to the exoskeleton trunk 2, the exoskeleton The skeletal trunk 2 is connected to the exoskeleton hip joint 3, and the exoskeleton hip joint 3 is respectively connected to the left exoskeleton lower limb 41 and the right exoskeleton lower limb 42. The mechanical arm 52 and the electric power automatic control system 6, the left balance auxiliary mechanical arm 51 and the right balance auxiliary mechanical arm 52 are respectively connected with the exoskeleton hip joint 3 or the exoskeleton trunk 4, and the electric power automatic control system 6 is respectively connected with the left exoskeleton arm 11 is electrically connected with right exoskeleton arm 12, exoskeleton trunk 2, exoskeleton hip joint 3, left ex...
Embodiment 2
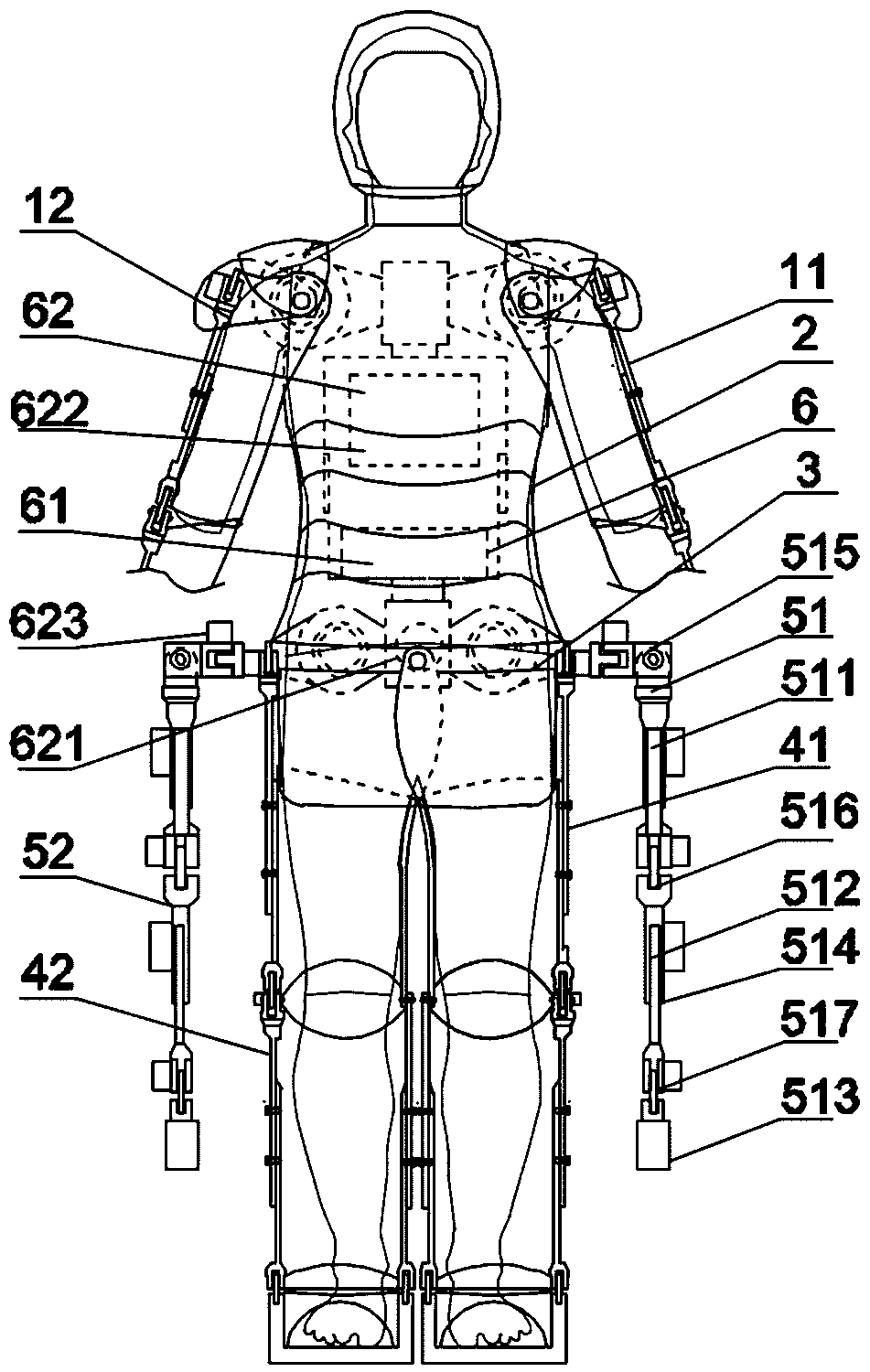
[0032] refer to image 3 , a multifunctional auxiliary arm self-balancing mechanical exoskeleton armor, the main difference from embodiment 1 is that this embodiment is an exoskeleton armor, and the exoskeleton armor increases protection on the basis of embodiment 1 and can make protection The hinged structure moves with the exoskeleton, and the protection of the rotating part is added at the hinge.
Embodiment 3
[0034] refer to Figure 4 and Figure 5 , a multifunctional auxiliary arm self-balancing mechanical exoskeleton or exoskeleton armor. The main difference from Embodiment 1 is that there are four balance auxiliary mechanical arms in this embodiment, two of which are symmetrically arranged at the front of the hip joint 3 of the exoskeleton. The two are symmetrically arranged at the rear of the exoskeleton hip joint 3, and the balance auxiliary manipulator in this embodiment adopts a flexible balance auxiliary manipulator 5', and the flexible balance auxiliary manipulator 5' includes a retractable pipe 53', three pull wires 52' and a pull wire mechanism 51', the three or four pull wires 52' are evenly distributed on the side of the telescopic pipe 53', one end of the pull wire 52' is fixed to the end of the telescopic pipe 53', and the other end is fixed to the telescopic pipe 53' through the pull wire mechanism 51' At the other end, the telescopic pipe 53' is elongated and supp...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More