

A docking system and docking method for an unmanned ship and auv
A technology for unmanned ships and cabins, applied in the field of docking systems between unmanned ships and AUVs, can solve the problems of limited range of activities, interference and shaking, low success rate, etc., to improve the docking success rate, reduce difficulty, and reduce costs.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0036] This embodiment provides a docking system between an unmanned ship and an AUV, including an unmanned ship on the water surface and an underwater AUV (autonomous underwater vehicle).
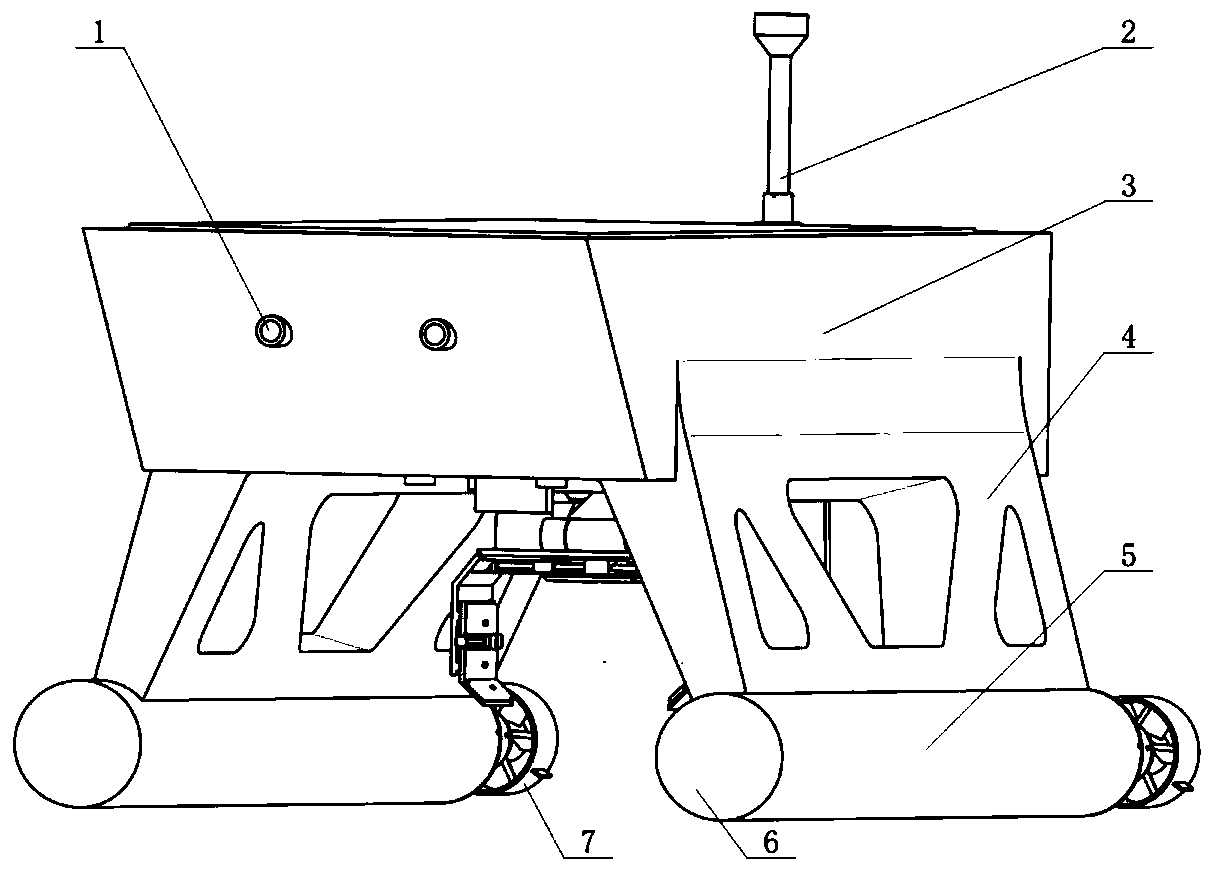
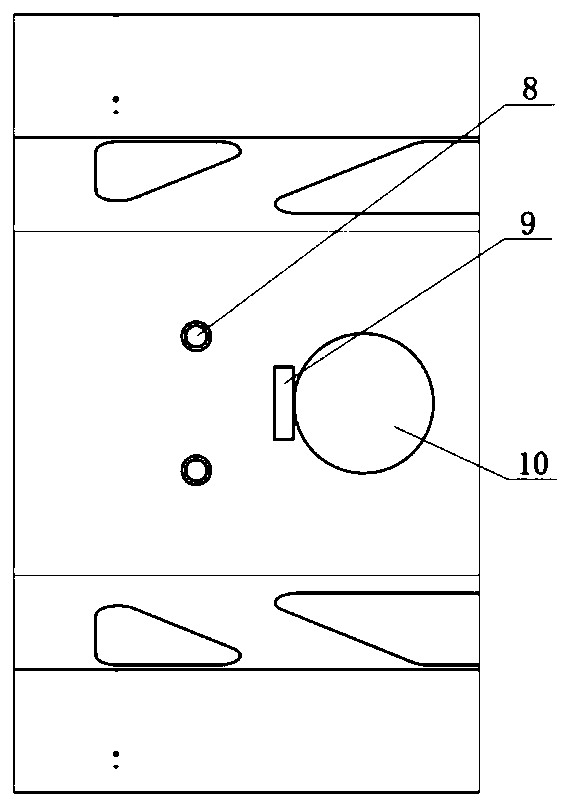
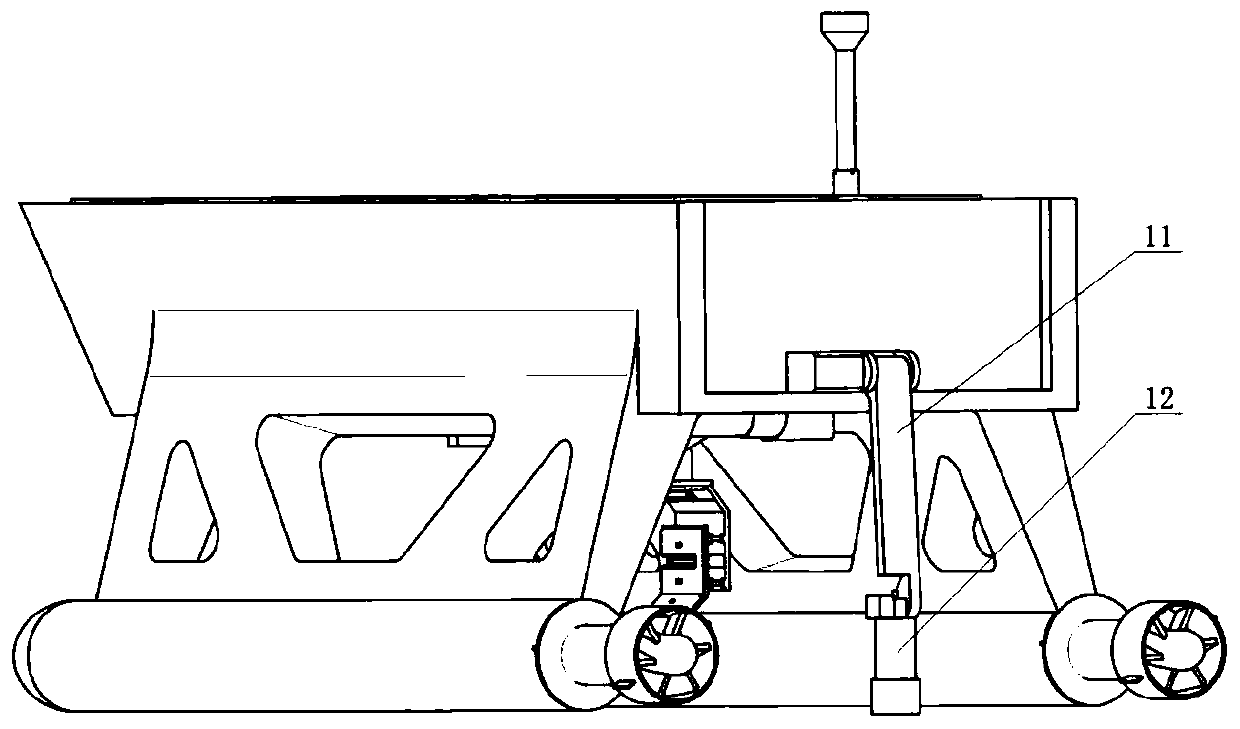
[0037] see Figure 1-3 The unmanned ship includes a cabin 3, a sheet body 4 located on both sides of the cabin 3, and a manipulator below the cabin. The cabin 3 is a sealed cabin located above the water surface. The cabin 3 is provided with the first electronic device for navigation control. A wireless communication device, a first power control device and a first video acquisition and transmission device, a USBL (ultra-short baseline positioning system) positioning assembly 12 is installed behind the cabin 3, and a floating body 5 is installed under the sheet body 4, and the floating body 5 is cylindrical , the front end is a shroud 6, the rear end is a propeller navigation thruster 7, and the manipulator is a four-degree-of-freedom manipulator for grabbing the AUV.
[0038] In this embo...
Embodiment 2
[0046] see Figure 7 , the present embodiment provides a docking method between an unmanned ship and an AUV, which uses the docking system between an unmanned ship and an AUV described in Embodiment 1, and the specific steps are as follows:
[0047] 1) The AUV and the unmanned ship maintain communication through the ultra-short baseline positioning system. When the AUV needs to be recovered, the unmanned ship detects the position of the AUV;
[0048] 2) According to the rendezvous strategy of the unmanned ship and the AUV, choose the unmanned ship to actively approach the AUV directly above or the AUV to actively move along the position of the unmanned ship, or both to move to a rendezvous point to rendezvous. When the two rendezvous , the AUV is near the water surface of the unmanned ship;
[0049] 3) The unmanned ship actively sails to the front of the AUV through visual recognition, and sails in the opposite direction to the AUV. When the AUV touches the swing arm at the t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More