

Underwater robot control method based on reinforcement learning and control method of tracking with underwater robot
A technology of underwater robot and control method, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problem of not considering underwater robot, unreachable, etc., so as to reduce the number of simulations and reduce calculation. Cost, the effect of good trajectory tracking
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0052] The present invention will be further described below in conjunction with accompanying drawing:
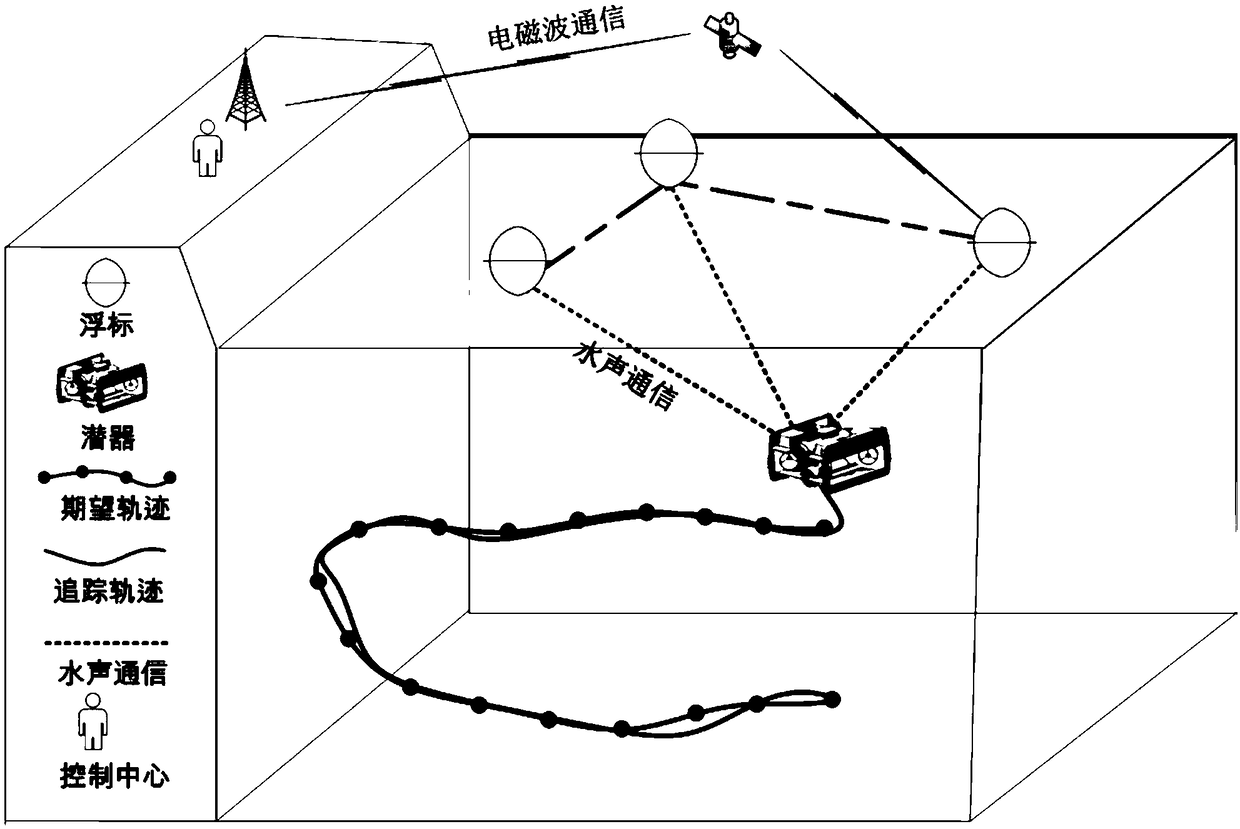
[0053] Such as figure 2 As shown, the present invention has a buoy relay on the water surface, uses it to self-position the underwater robot, and the control center gives the expected trajectory information of the underwater robot and sends it to the underwater robot; the underwater robot controller controls the driver according to the system control Drive to complete the motion of the underwater robot.
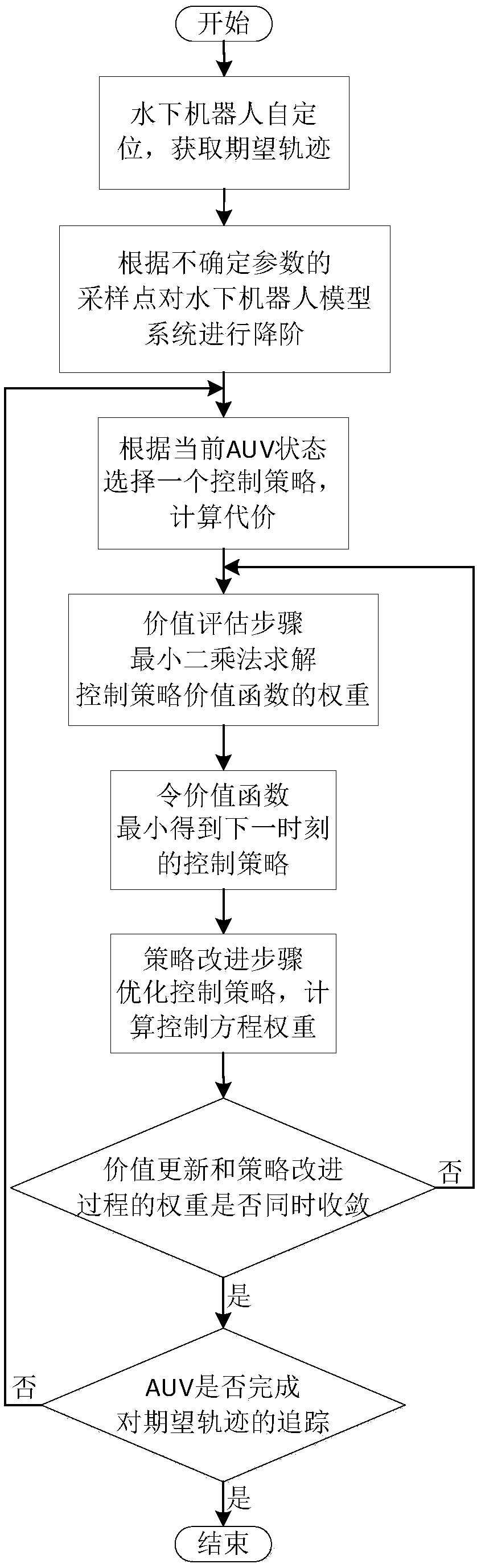
[0054] Such as figure 1 As shown, the present invention has set forth a kind of underwater robot control method based on reinforcement learning, and its method comprises the following steps:
[0055] Step 1 The underwater robot is affected by the surrounding environment underwater, and it is necessary to evaluate the uncertain factors in the underwater robot model in order to complete the control of the driver by the underwater robot controller; the underwater robot has...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More