

Unmanned aerial vehicle-based autonomous polling method for towers
A technology of unmanned aerial vehicles and towers, applied in non-electric variable control, instrument, attitude control and other directions, can solve the problems of unfavorable historical inspection data analysis and application, difficulty in ensuring inspection consistency, and large differences in shooting results, etc. Achieve high inspection efficiency, solve the high pressure of manual inspection, and short inspection time.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The technical solution of the present invention will be further described in detail below in conjunction with the accompanying drawings, but the protection scope of the present invention is not limited to the following description.
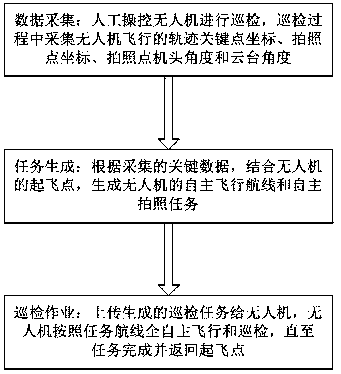
[0026] Such as figure 1 As shown, a UAV-based autonomous tower inspection method includes the following steps:
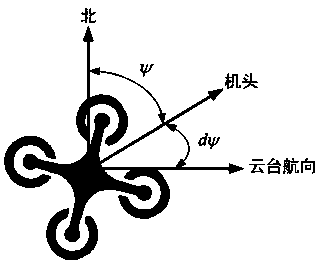
[0027] S1. Data collection: Manually control the UAV to conduct inspections. During the inspection process, the coordinates of the key points of the trajectory of the UAV flight, the coordinates of the photo point, the angle of the nose of the photo point and the angle of the gimbal are collected;
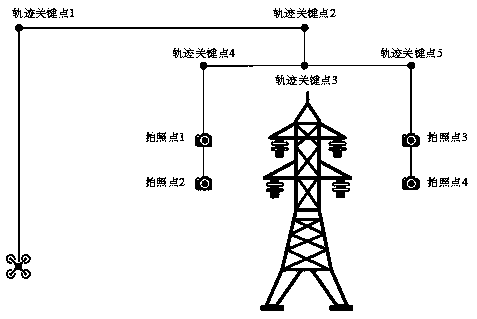
[0028] In the embodiment of this application, the trajectory key points and photographing points of the UAV are as figure 2 As shown, the key point coordinates of the track include the longitude, latitude and height of the corner point of the flight track of the drone; the coordinates of the photographing point include the longitude...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More