

Method, device, apparatus and medium for extracting obstacle perception error data
A technology of error data and extraction method, applied in the field of obstacle perception error data extraction, can solve the problems of missed identification of low obstacles, wrong identification of non-obstacles, hidden dangers of unmanned vehicle driving safety, etc., to reduce safety hidden dangers, improve accuracy and reliability, and optimize the effect of obstacle perception models
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
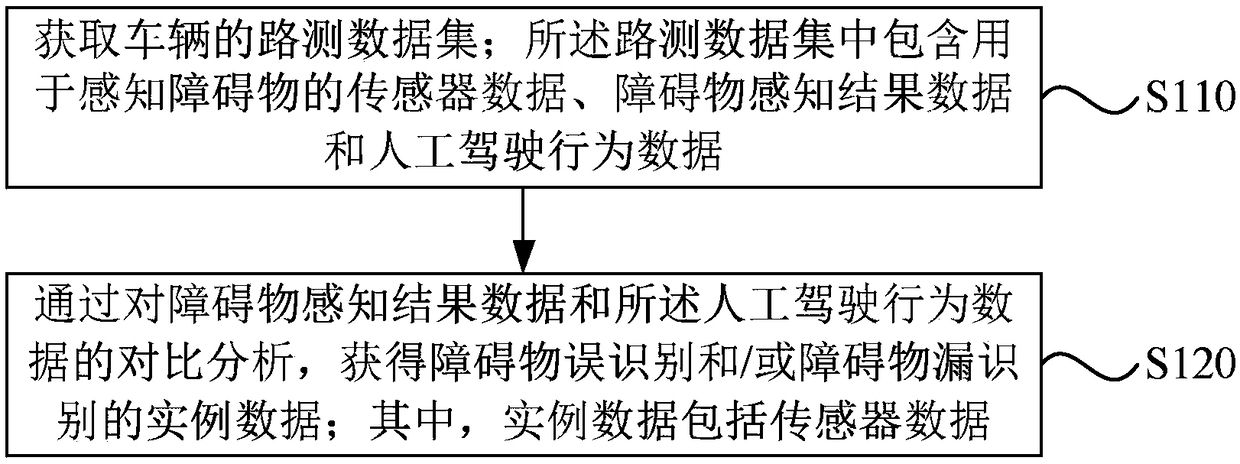
[0023] figure 1 It is a flowchart of a method for extracting obstacle perception error data in Embodiment 1 of the present invention. The embodiment of the present invention is applicable to the situation where the training samples of the obstacle perception model are collected through the open-loop mode of manual driving in the iterative development stage of the algorithm of the unmanned driving perception system. The device is implemented by software and / or hardware, and is specifically configured in an unmanned vehicle.
[0024] Such as figure 1 The method for extracting the obstacle perception error data shown includes:
[0025] S110. Acquire a drive test data set of the vehicle; the drive test data set includes sensor data for sensing obstacles, obstacle perception result data, and manual driving behavior data.
[0026] Wherein, the sensor data includes the image data output by the camera in the vehicle, the point cloud data output by the laser radar in the vehicle, an...
Embodiment 2
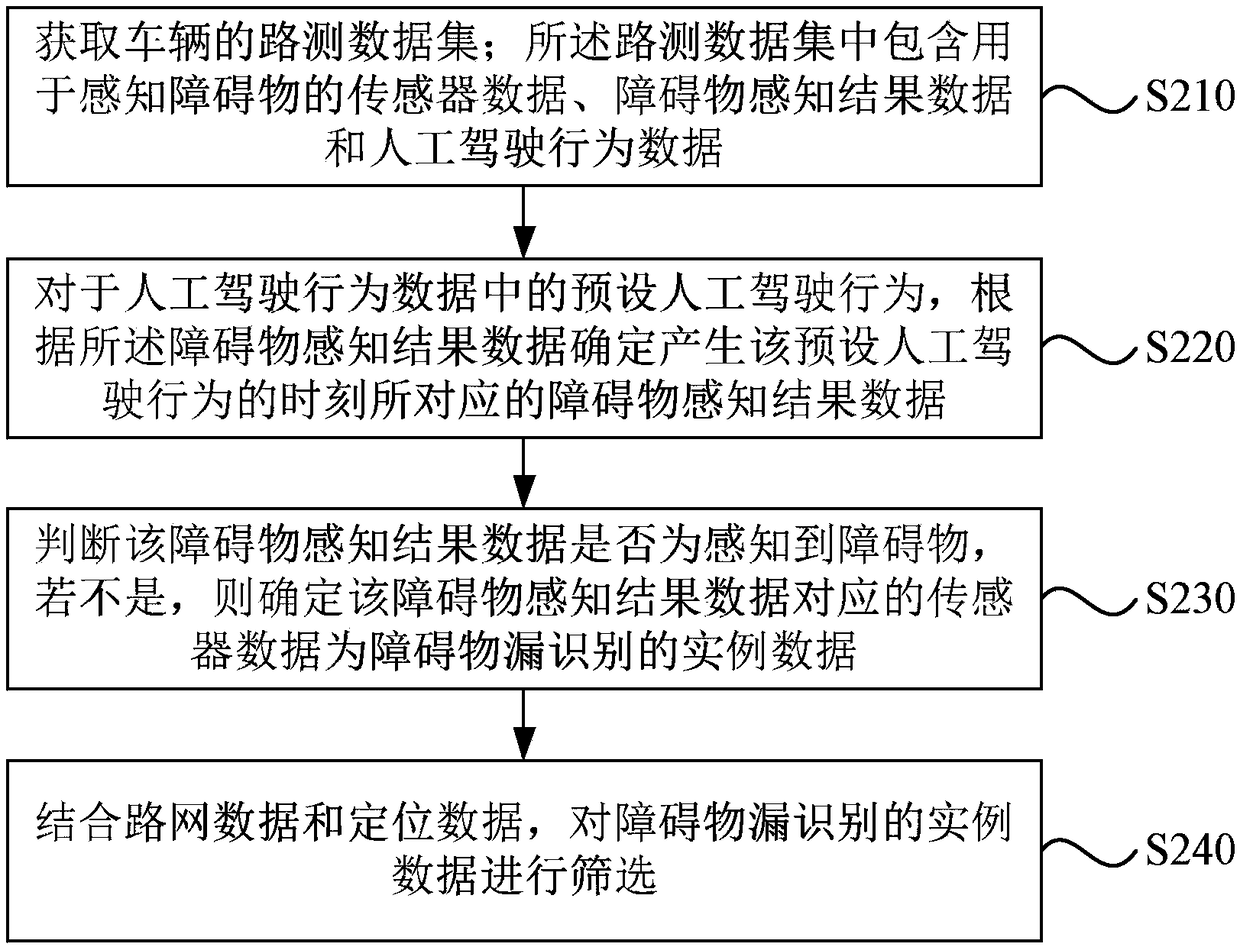
[0043] figure 2 It is a flowchart of a method for extracting obstacle perception error data in Embodiment 2 of the present invention. The embodiment of the present invention performs additional optimization on the basis of the technical solutions of the foregoing embodiments.
[0044] Further, after the operation "obtaining the instance data of missing obstacle recognition", add "combine road network data and positioning data, and filter the instance data of missing obstacle recognition" to filter the instance data of missing recognition Eliminate non-erroneous data to improve the purity of obstacle perception error data.
[0045] Such as figure 2 The method for extracting the obstacle perception error data shown includes:
[0046] S210. Acquire a drive test data set of the vehicle; the drive test data set includes sensor data for sensing obstacles, obstacle perception result data, and manual driving behavior data.
[0047] S220. For the preset manual driving behavior in...
Embodiment 3
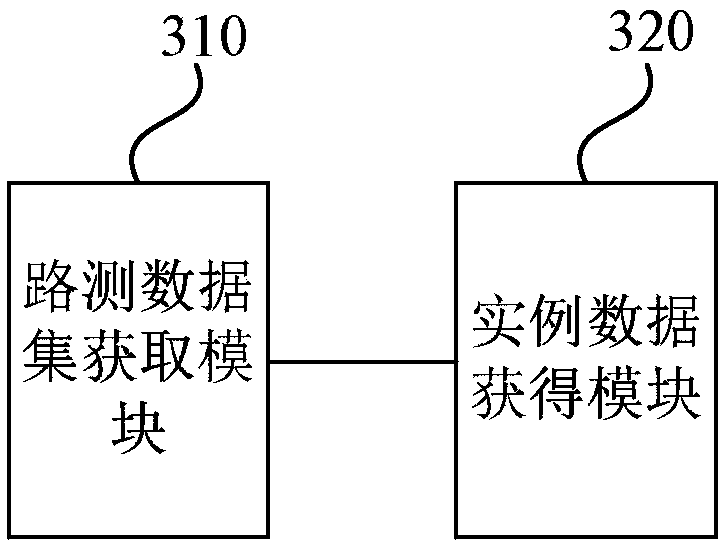
[0059] image 3 It is a schematic structural diagram of a device for extracting obstacle perception error data in Embodiment 3 of the present invention. The embodiment of the present invention is applicable to the situation where the training samples of the obstacle perception model are collected through the open-loop mode of manual driving in the iterative development stage of the algorithm of the unmanned driving perception system. The device is implemented by software and / or hardware, and specifically deployed in unmanned vehicles. image 3 The device for extracting obstacle perception error data includes: a drive test data set acquisition module 310 and an instance data acquisition module 320 .
[0060] The drive test data set acquisition module 310 is used to acquire the drive test data set of the vehicle; the drive test data set includes sensor data for perceiving obstacles, obstacle perception result data and manual driving behavior data;
[0061] The instance data ob...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More