

Cascaded control method of underwater ultrahigh-speed navigation body
A cascade control, supercavitating vehicle technology, applied in the directions of adaptive control, general control system, control/regulation system, etc., can solve problems such as the tail oscillation of the vehicle, achieve easy engineering implementation, and simplify the design process and steps full effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
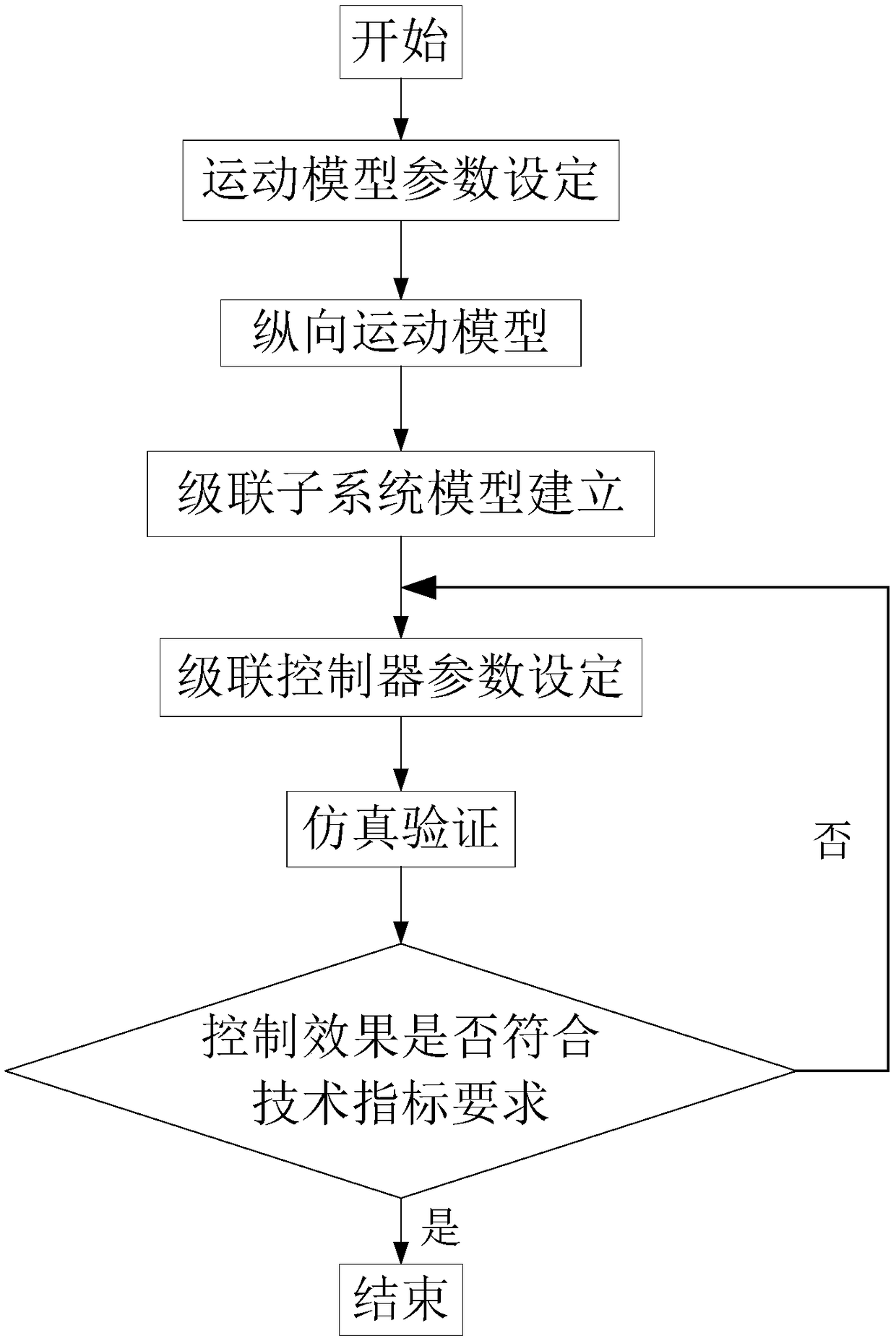
[0047] A cascade control method for an underwater ultra-high-speed vehicle, the specific implementation steps are as follows:
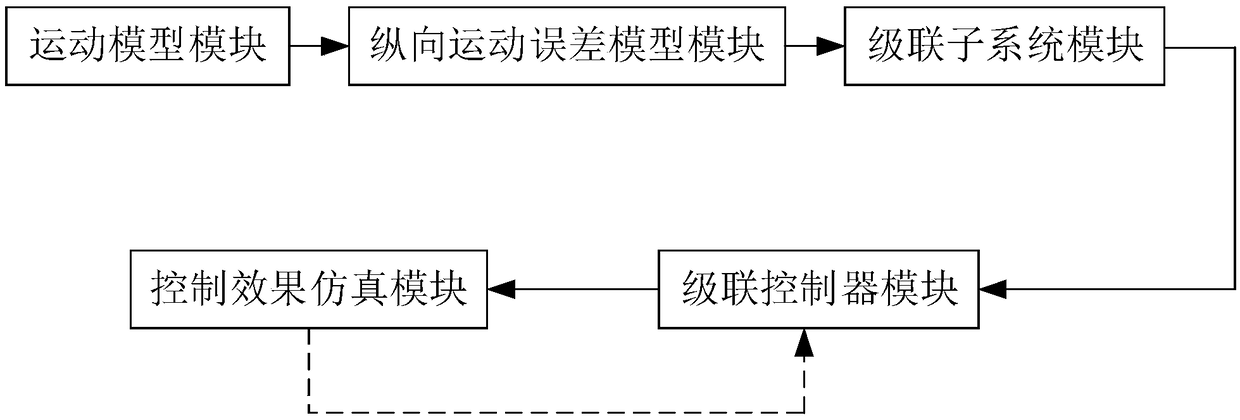
[0048] Step 1. Establish the motion model module of the underwater ultra-high-speed super-cavitation vehicle, set the model parameters, the model has the characteristics of the longitudinal motion of the underwater ultra-high-speed vehicle, and can replace the actual vehicle during the simulation and control process;
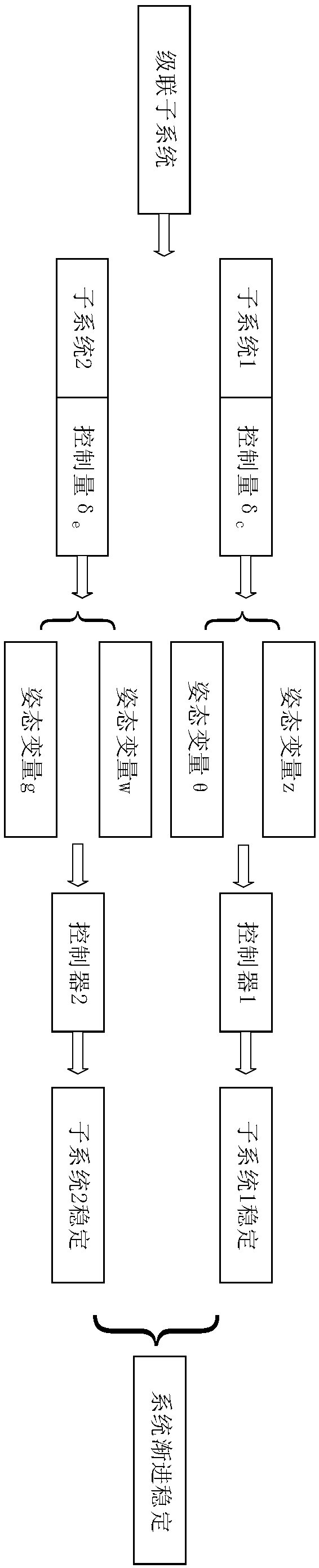
[0049] Step 2. Establish the nonlinear dynamic model of the longitudinal motion of the underwater ultra-high-speed vehicle, and obtain the center of mass displacement z of the vehicle, the longitudinal pitch angle θ of the vehicle, the vertical velocity w of the vehicle, and the Pitch angular velocity q;
[0050] Step 3. Establish a longitudinal motion error model module, calculate the error between the actual motion of the underwater ultra-high-speed vehicle and the set motion trajectory from the result obtained by the nonlinear dynamic ...
Embodiment 2
[0083] The invention relates to a control method of an underwater ultra-high-speed vehicle, in particular to a cascade control method.
[0084] Supercavitation technology is a unique drag reduction technology for underwater vehicles, which can significantly reduce the fluid resistance suffered by the vehicle. The underwater ultra-high-speed vehicle that adopts supercavitation technology to realize high-speed navigation can realize underwater high-speed direct navigation of more than 100m / s. Due to the package of cavitation, the wetted area of the vehicle is significantly reduced. Only the cavitator installed on the top, the empennage at the rear of the vehicle, and the tail expose the wetted area of the cavitation. Therefore, compared with conventional underwater vehicles, , the action mode and numerical value of the lift force provided by the fluid for the underwater ultra-high-speed vehicle have obviously changed, and the nonlinear hydrodynamic force acting on the tail o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More