

Crane variable amplitude speed regulation system and method using inverse model and pid double compensation
An inverse model, crane technology, applied in control systems, vector control systems, control generators, etc., can solve the problems of the complex function form of the boom luffing system, the inability of the luffing speed to maintain a uniform speed, and the insufficient application control principle. It is easy to understand, reduce design errors and leaks, and is easy to program and calculate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0047]In order to facilitate those of ordinary skill in the art to understand and implement the present invention, the present invention will be described in further detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the implementation examples described here are only used to illustrate and explain the present invention, and are not intended to limit this invention.
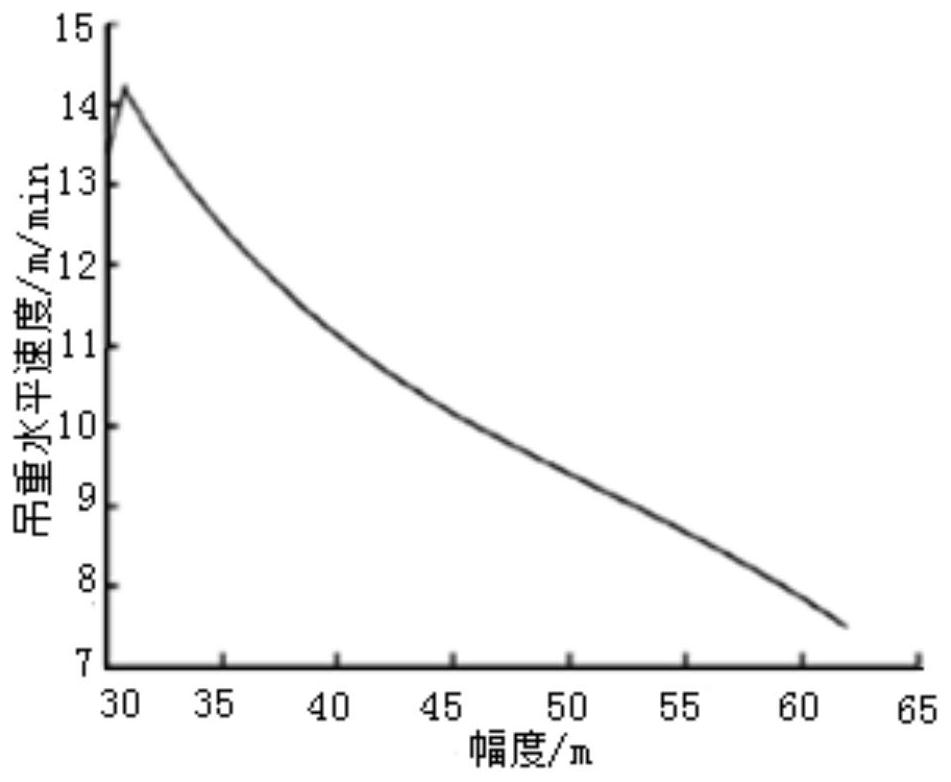
[0048] The variable-amplitude speed-regulation control system using the inverse model + PID double compensation provided by the present invention is obtained by optimizing the ordinary frequency-variable speed-regulation system according to the direction of making the speed-regulation performance ideal. The ideal luffing speed control system of the combined jib type portal crane certainly hopes that when the luffing joystick remains constant during the luffing process, the luffing speed should also be kept constant, but in the existing luffing speed control sys...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More