

Geometrical calibration tool and method for multi-robot base coordinate system
A base coordinate system and multi-robot technology, applied in the field of robot calibration, can solve the problems of high technical requirements for operators, high prices, and inability to perform dual-robot multi-robot base coordinate calibration, etc., to achieve accuracy, low cost, and high efficiency. The effect of market application value
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
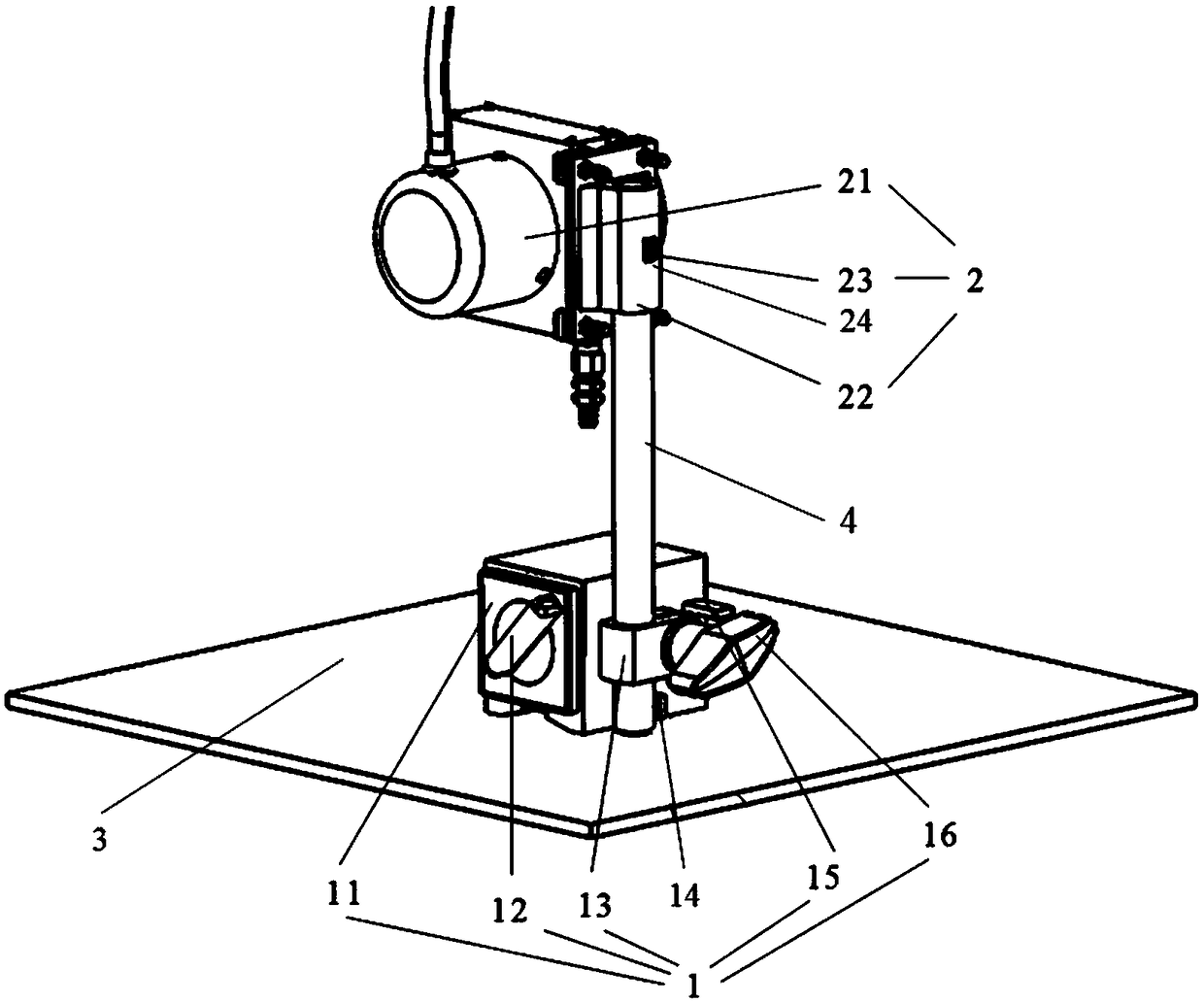
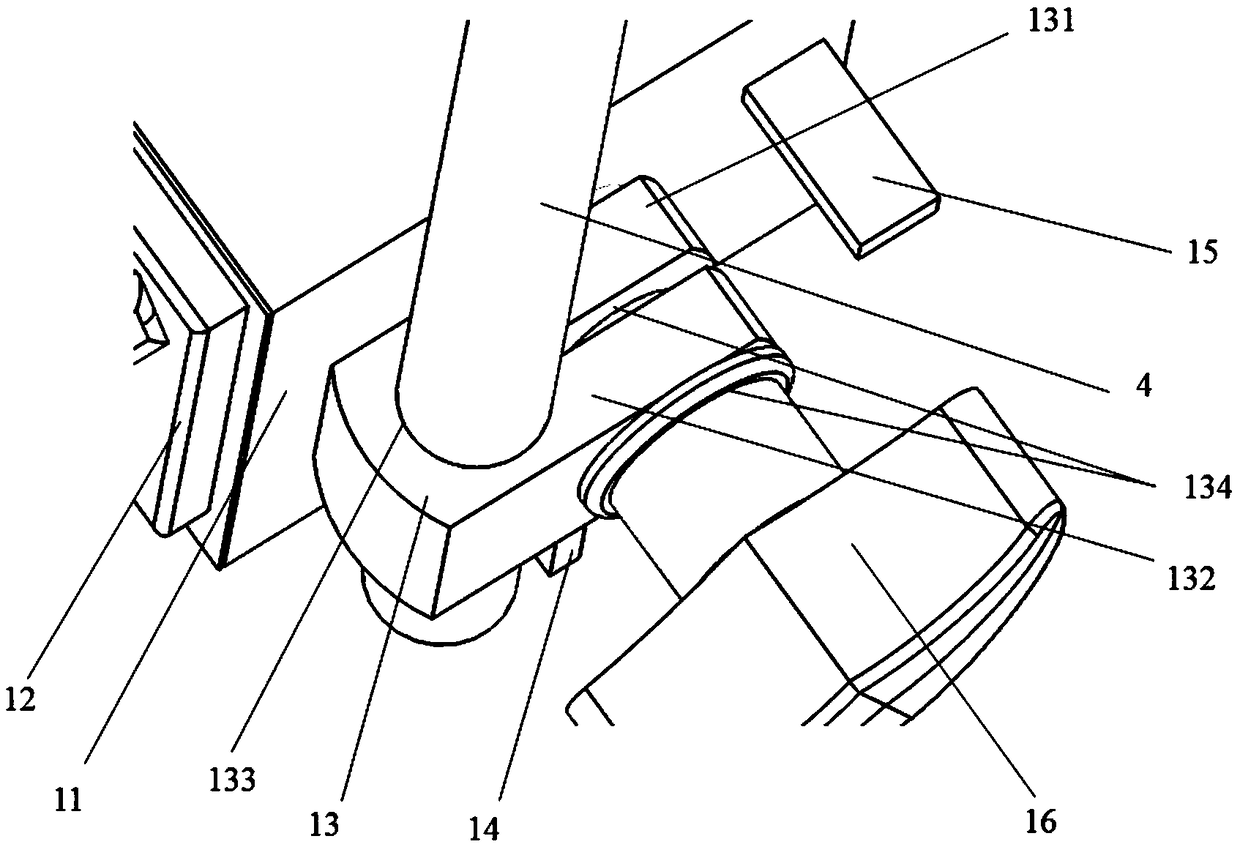
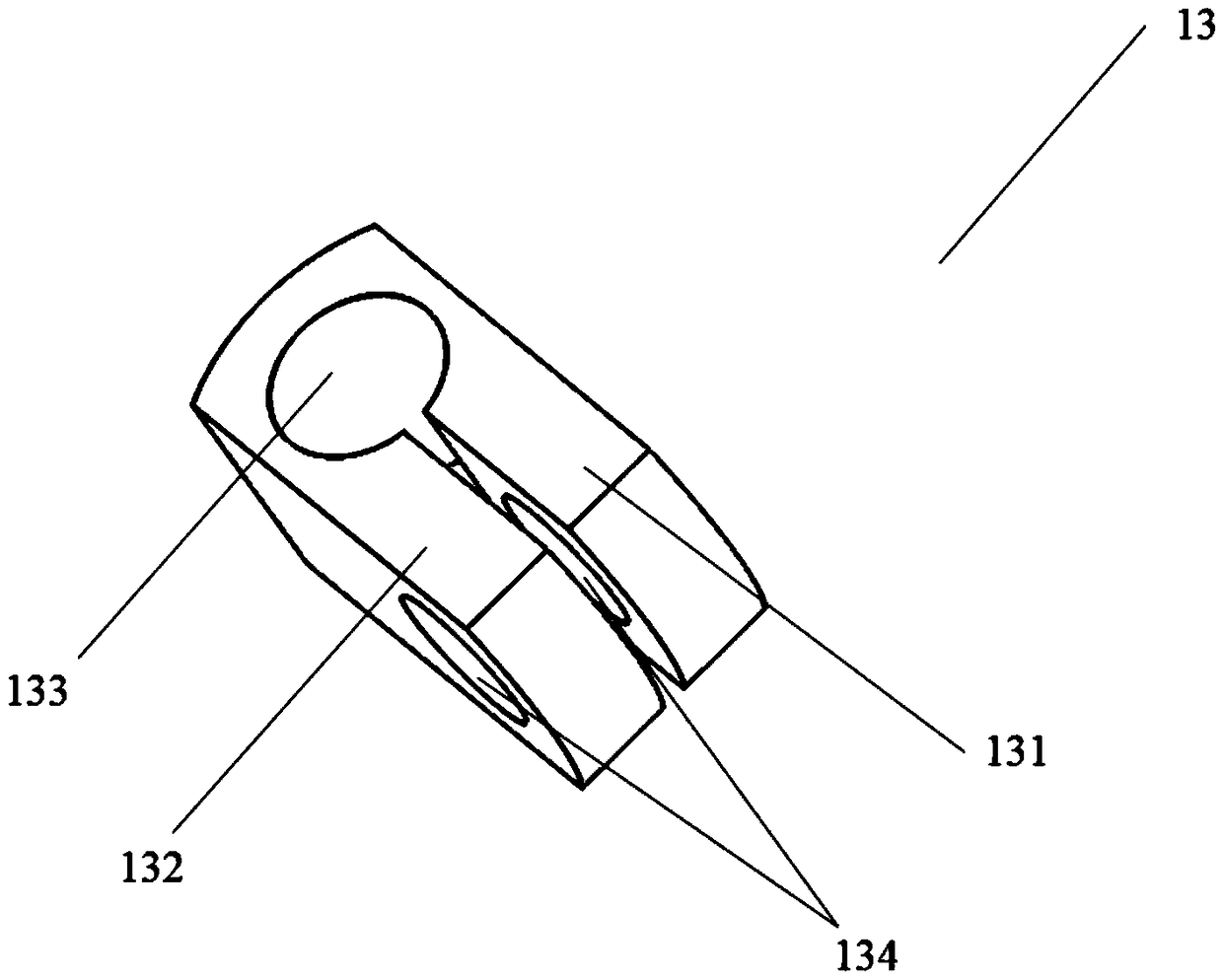
[0055] Embodiment one, as Figure 1-3 As shown, a multi-robot base coordinate system geometric calibration tooling includes a substrate 3, a magnetic base 1 adsorbed on the surface of the substrate 3, a wire measuring device 2 connected to a robot, and a guide rod 4. The magnetic The base 1 is movably connected with the lower end of the guide rod 4 , and the stay wire measuring device 2 is movably connected with the upper end of the guide rod 4 .
[0056] Through the adsorption and separation of the magnetic base and the substrate, the stability of the entire calibration tool can be achieved during calibration, ensuring the accuracy of calibration, and it can be easily disassembled, portable and practical; It is convenient to adjust the posture of the calibration tool, select multiple calibration points, and facilitate the fixing of the pull-wire measuring device to ensure the stability and accuracy of the calibration. The entire calibration tool has a simple structure, is por...
Embodiment 2
[0073] Embodiment two, such as Figure 4-9 As shown, the multi-robot base coordinate system geometric calibration method, which uses the calibration tooling in Embodiment 1 of the present invention, includes the following steps:
[0074] S1: Adjusting the calibration tooling at multiple calibration points, and connecting the cable measuring device to the end of the robot to be calibrated;
[0075] S2: Control the robot to be calibrated to sequentially move to multiple teaching points through instructions from the teaching pendant, and obtain the end positions of multiple robots to be calibrated and the distance between multiple calibration points and the teaching points rope length;
[0076] S3: Simultaneously formulate kinematic equations according to the terminal positions of the multiple robots to be calibrated and the multiple rope lengths, and solve the positions of multiple calibration points relative to the base coordinate system of the robot to be calibrated;
[0077...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More