Unmanned boat track tracing intelligent learning control method
A technology of intelligent learning and track tracking, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems of large slewing, long convergence time, difficult to obtain accurate hydrodynamic coefficient, etc., and achieve small tracking The effect of error, reduced dependence, and fast tracking control response speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment 1
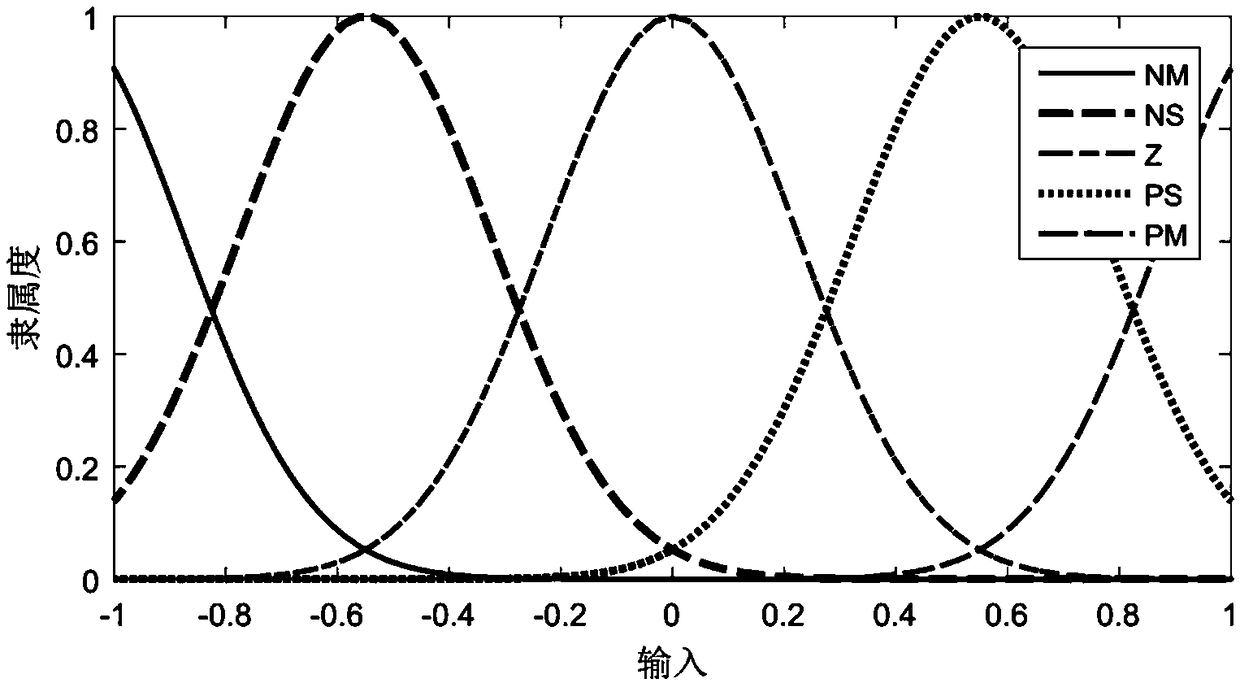
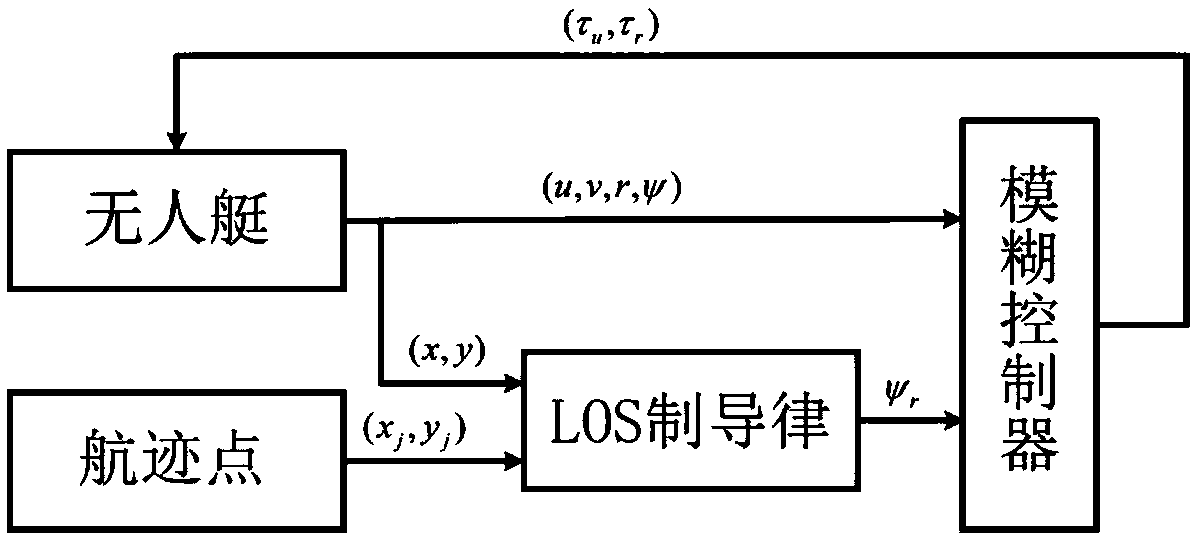
[0040] The invention discloses an intelligent learning control method for track tracking of an unmanned boat, which belongs to the technical field of intelligent control of unmanned boats. The expected heading angle in the track tracking process is calculated from the reference waypoint and the real-time position of the UAV according to the Line-of-Sight (LOS) guidance strategy, and the radius of the LOS circle for solving the reference waypoint is designed as a function of the yaw distance , which can effectively improve the track tracking convergence performance of the unmanned vehicle. The fuzzy adaptive control method is introduced into the control of speed and course, and the speed information of the unmanned ship is used as the input to learn the model of the unmanned ship online, and the output of the fuzzy system is used to construct a robust dynamic controller. The track tracking control method provided by the invention can quickly eliminate the yaw error, and the con...
specific Embodiment 2
[0071] In the first step, a number of track points are preset according to the operation task of the unmanned vehicle, and the track points are connected in turn to generate a composite path composed of straight line path units, and the real-time reference path points on each straight line path unit are extracted:
[0072]
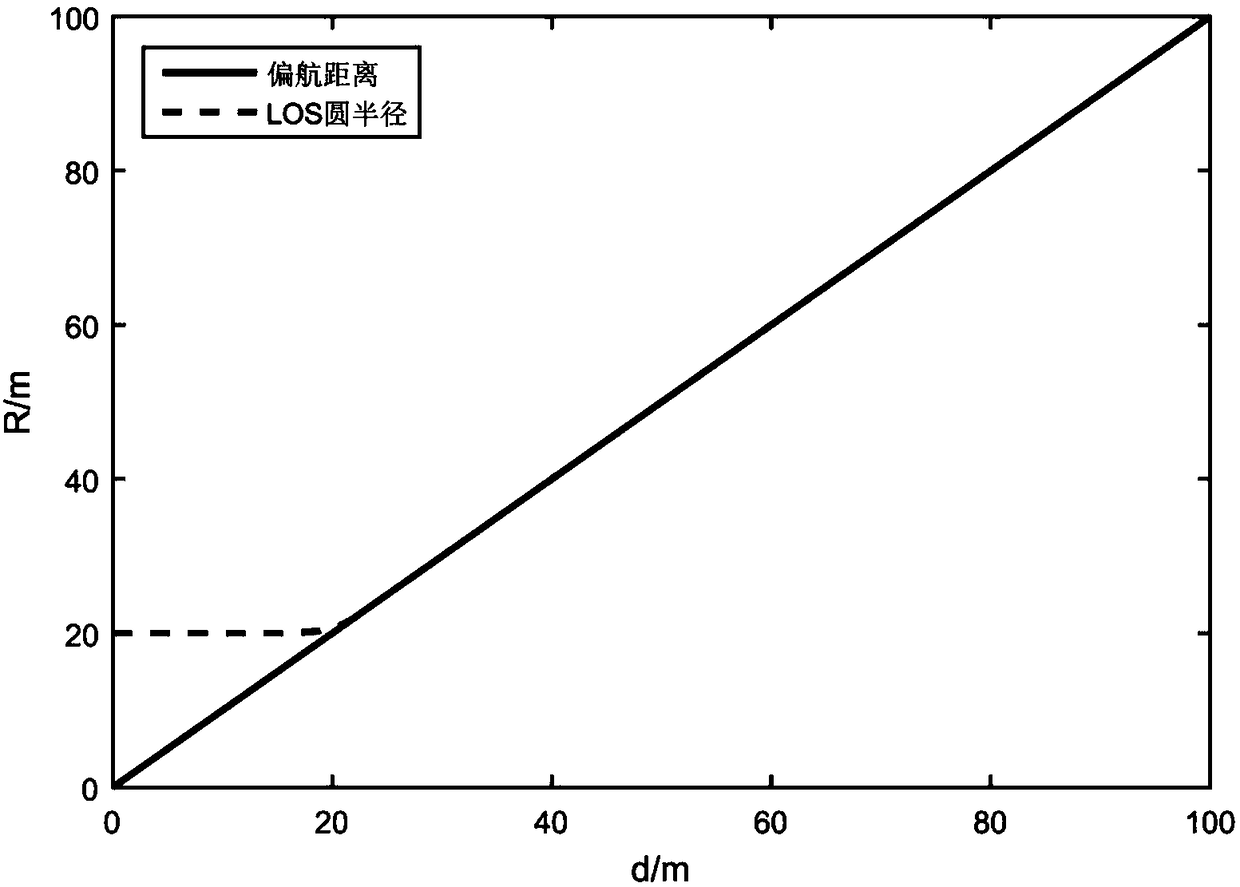
[0073] In the formula, (x r ,y r ) is the real-time reference path point, (x j ,y j ), j=1,2,...j...n is the predetermined jth track point coordinates, (x,y) is the real-time position of the unmanned boat, α j-1 is the connecting track point (x j-1 ,y j-1 ) and (x j ,y j ), R is the radius of the Line-of-Sight circle, and its calculation method is as follows:
[0074]
[0075] Among them, d is the yaw distance, that is, the lateral tracking error between the UAV and the expected path, R min is the radius of the minimum inscribed circle, δ is the thickness of the boundary layer, and λ is an adjustable parameter, when the yaw distance d≤R min ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com