

Autonomous collision avoidance decision-making method for unmanned ship based on adaptive navigation situation learning
A technology of unmanned driving and decision-making methods, applied in two-dimensional position/course control, non-electric variable control, instruments, etc., can solve the problems of inexperienced application, difficulty in forming a knowledge base, and less research on autonomous collision avoidance decision-making. Achieve safe and autonomous collision avoidance decision-making, speed up iteration, and avoid difficult-to-perceive effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] In order to make the technical solutions and advantages of the present invention clearer, the following describes the technical solutions in the embodiments of the present invention clearly and completely in conjunction with the drawings in the embodiments of the present invention:
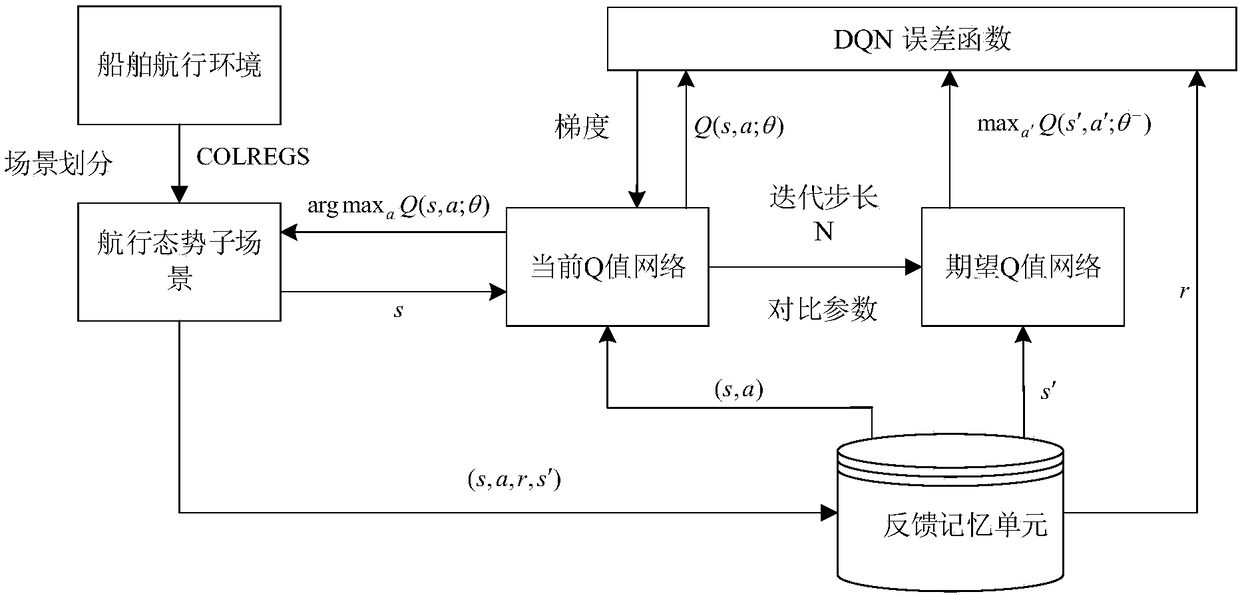
[0048] Such as figure 1 A method for autonomous collision avoidance decision-making for unmanned ships based on adaptive navigation situation learning is shown. The specific steps are as follows:
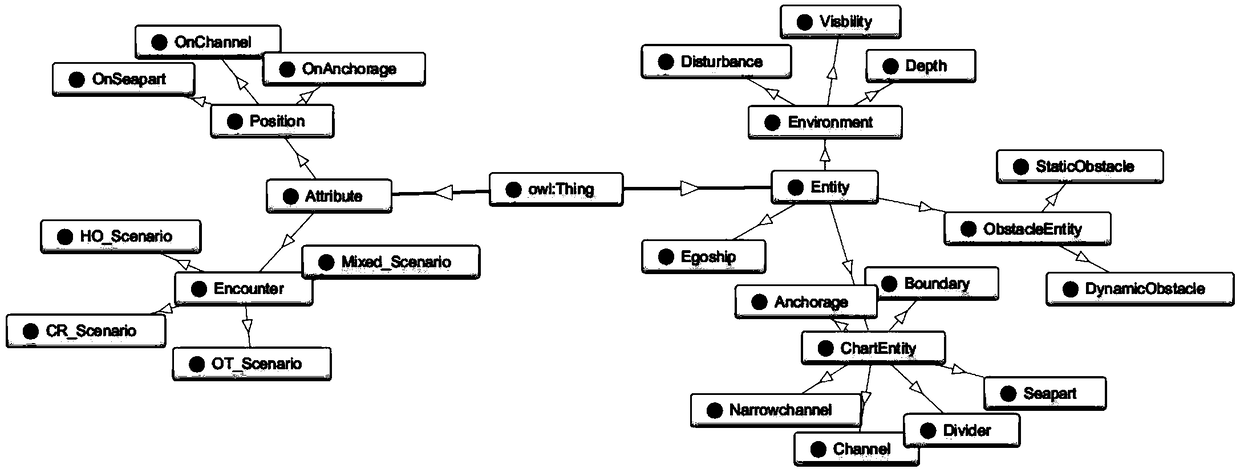
[0049] Step 1: Analyze and describe the navigation status information of unmanned ships, classify ship navigation safety information such as chart information, ship and obstacle information into entity classes and attributes, and construct an ontology model of navigation situation estimation for unmanned ships, such as figure 2 Shown
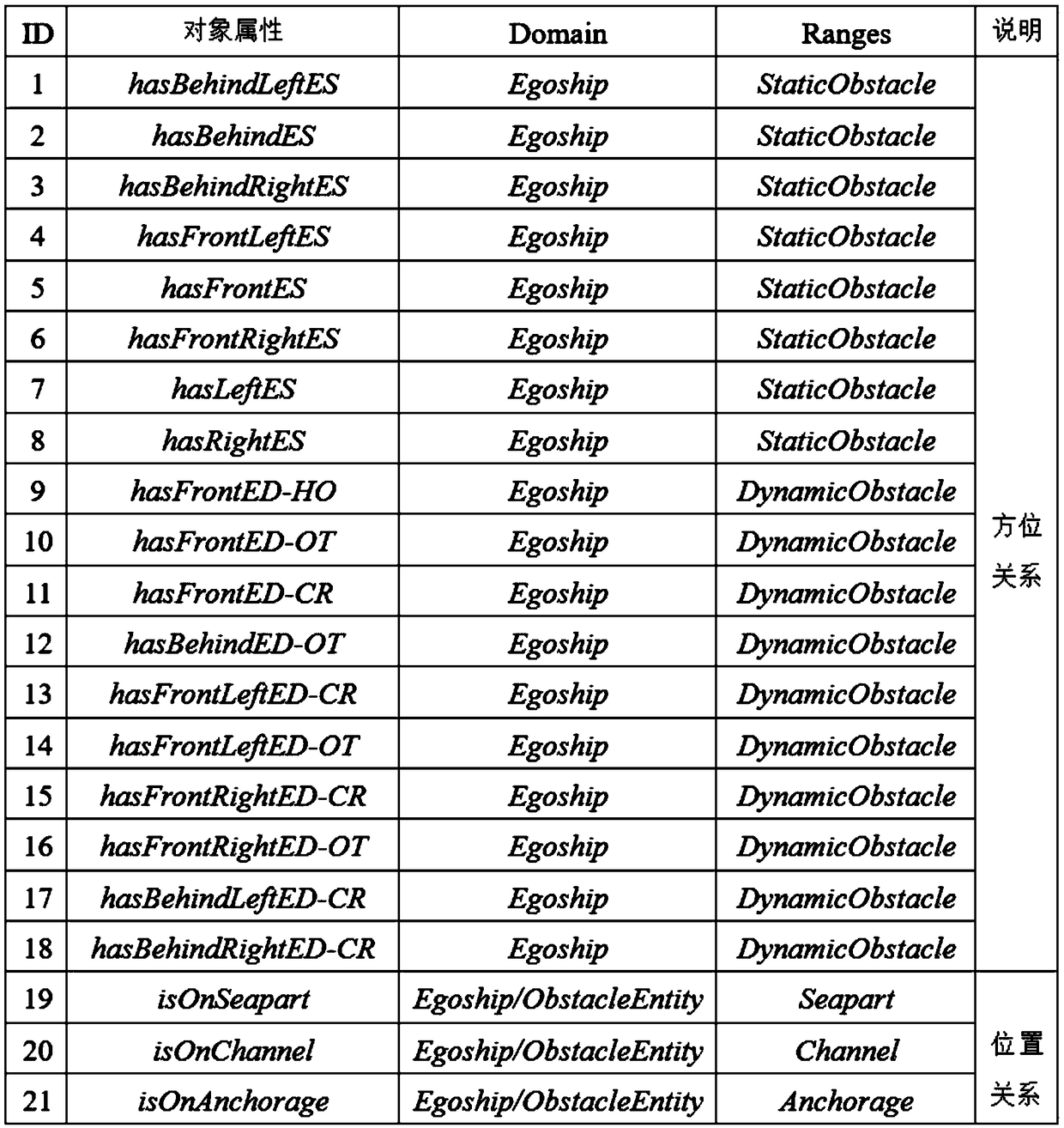
[0050] Step 2: Build the relationship attribute table of the marine ship navigation situation ontology model, such as image 3 Shown. The relationship between the unman...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More