

Interaction method and device of robot space positioning
A space positioning and interaction method technology, which is applied in the field of robot space positioning interaction methods and devices, can solve the problems of being unable to quickly and accurately locate the specific location of the instruction user, and cannot accurately execute user instructions, so as to improve interaction efficiency and user experience. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
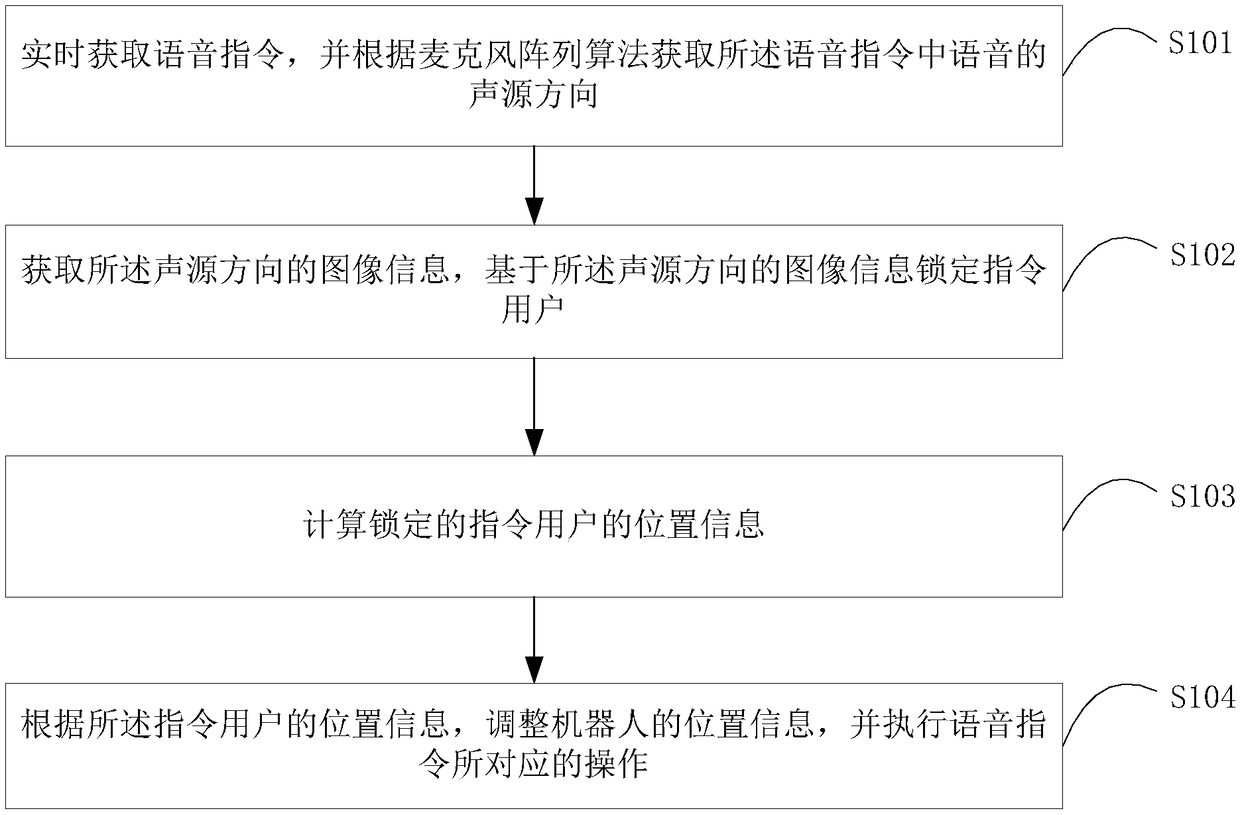
[0030] figure 1 It shows a flow chart of an interactive method for robot spatial positioning provided by an embodiment of the present invention, which is described in detail as follows:
[0031] In step S101, the voice command is acquired in real time, and the sound source direction of the voice in the voice command is acquired according to the microphone array algorithm.
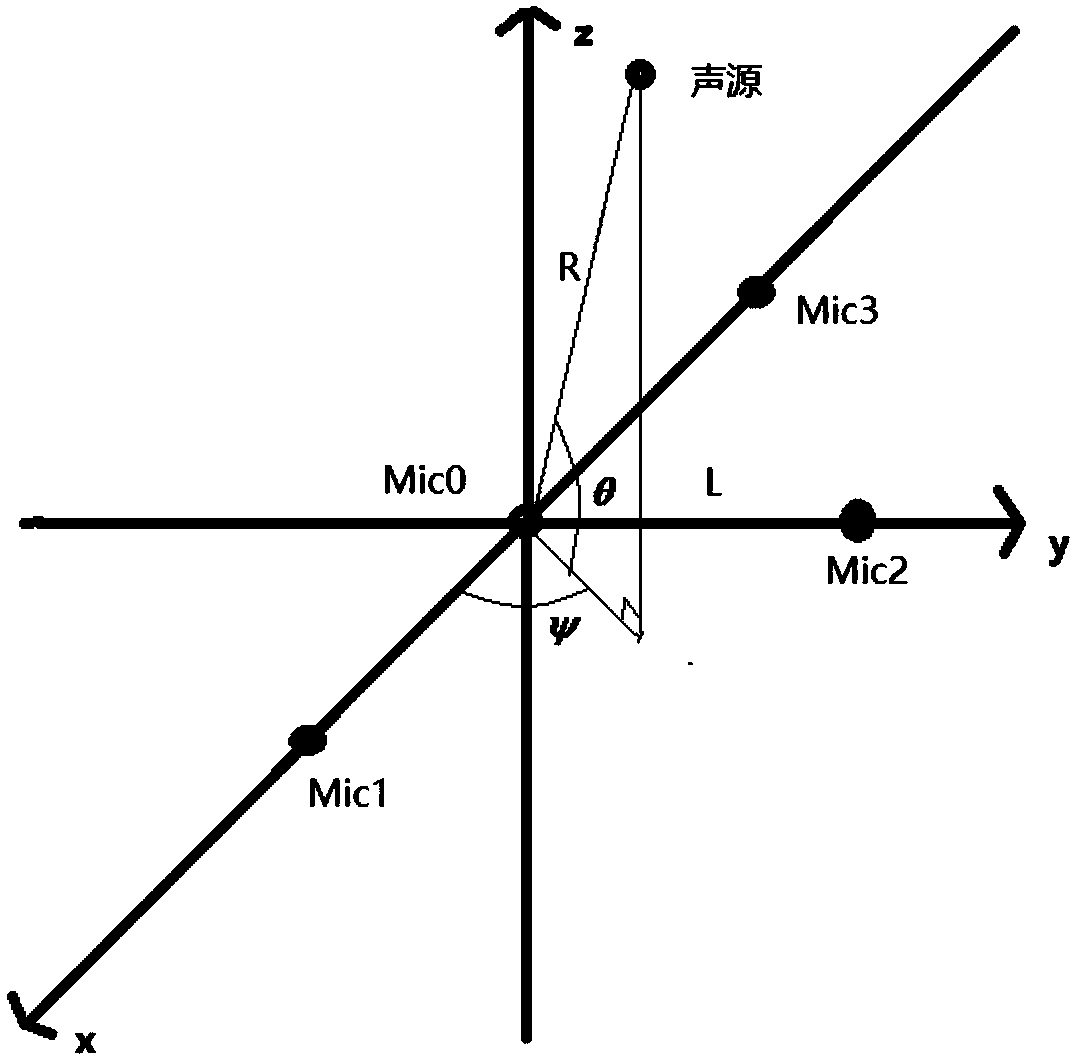
[0032] Specifically, in the embodiment of the present invention, the robot performs recording through the system, controls the microphone array to pick up voice in real time in all directions while recording, receives voice commands, and then obtains the direction of the sound source through the microphone array algorithm. A single microphone can only obtain sound information, while a microphone array composed of multiple microphones placed in a certain geometric position can obtain not only sound information but also spatial information of sound.
[0033] Optionally, in order to avoid interference and sav...
Embodiment 2
[0100] image 3 A flow chart showing another interactive method for robot spatial positioning provided by an embodiment of the present invention is described in detail as follows:
[0101] In step S201, the voice command is acquired in real time, and the sound source direction of the voice in the voice command is acquired according to the microphone array algorithm.
[0102] In this embodiment, for the specific steps of step S201, refer to step S101 of the first embodiment, which will not be repeated here.
[0103] Step S202, judging whether the voice command is noise according to the sound characteristics of the voice command.
[0104] Specifically, in the embodiment of the present invention, the microphone array picks up speech in all directions, and the omnidirectional direction may be 360 degrees in the horizontal direction or 360 degrees in the vertical direction. The voice instruction includes sound signals from various sound source directions, so the received voice ...
Embodiment 3
[0115] Corresponding to the interactive method of robot spatial positioning described in the above embodiments, Figure 4 It shows a structural block diagram of an interactive device for robot spatial positioning provided by an embodiment of the present invention, the device can be applied to a smart terminal, and the smart terminal can include user equipment that communicates with one or more core networks via a radio access network RAN , the user equipment may be a computer with a mobile device, for example, an intelligent robot. For ease of description, only parts related to the embodiments of the present invention are shown.
[0116] refer to Figure 4 , the interaction device for spatial positioning of the robot includes: a direction acquisition unit 31, a user locking unit 32, a position calculation unit 33, and an operation execution unit 34, wherein:
[0117] The direction obtaining unit 31 is used to obtain the voice instruction in real time, and obtain the sound so...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More