Five-freedom-of-degree magnetic levitation bearing dual contrary complementary electric excitation controller
A magnetic levitation bearing and controller technology, applied in the direction of magnetic bearings, bearings, shafts and bearings, etc., can solve the problems of low efficiency, long control cycle, and no centralized management of information, and achieve high efficiency, short control cycle, and fast energy storage Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
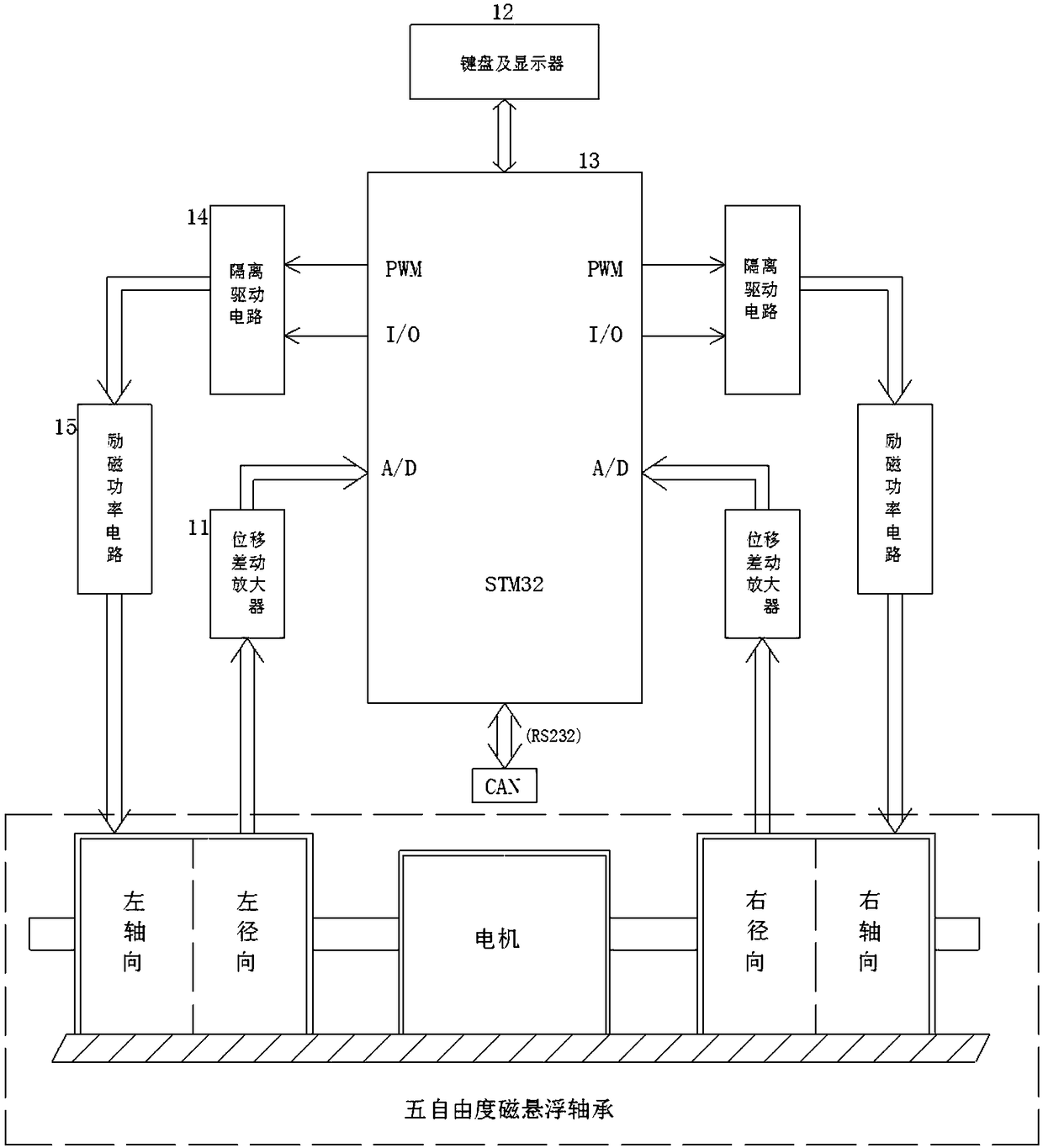
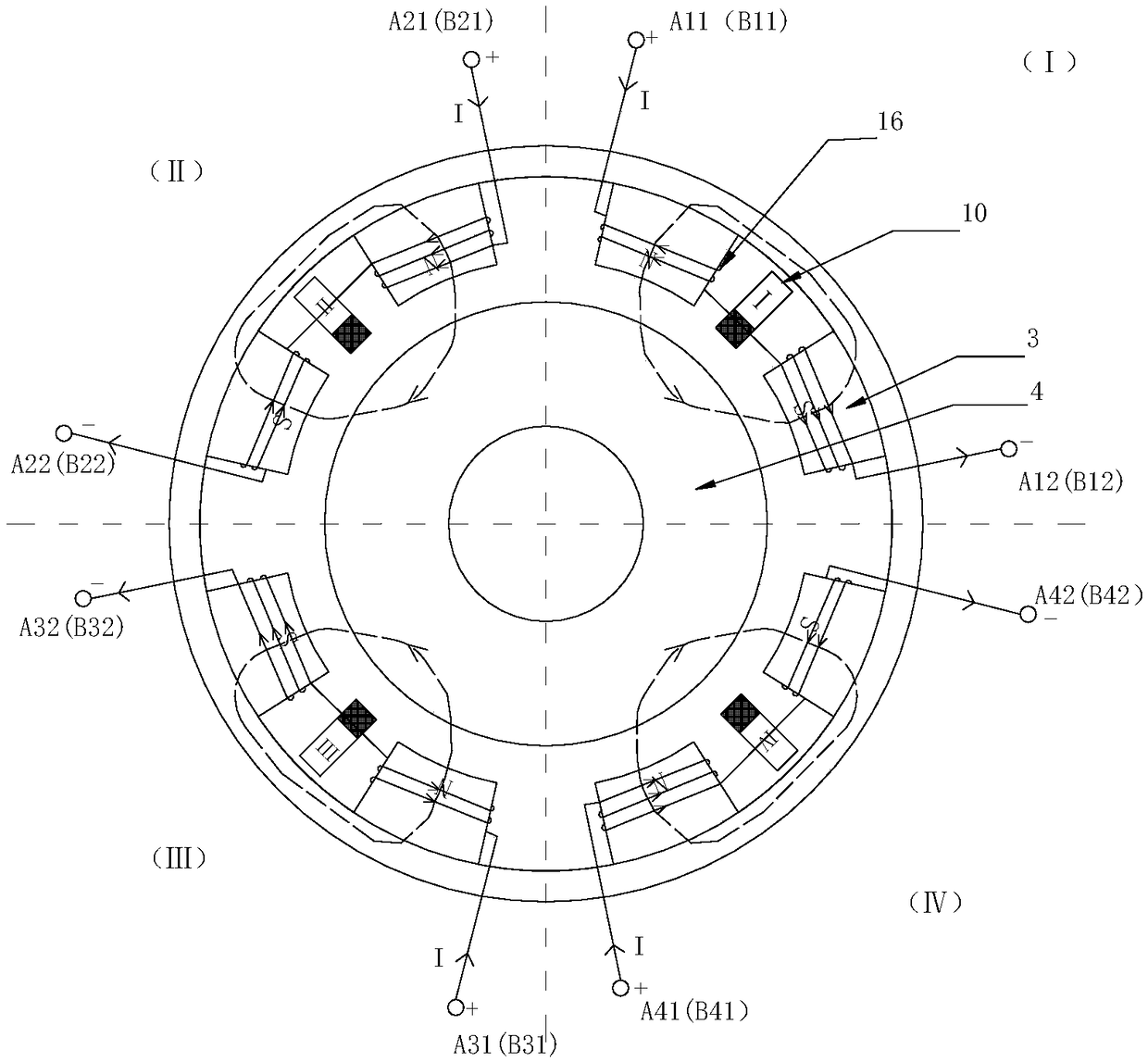
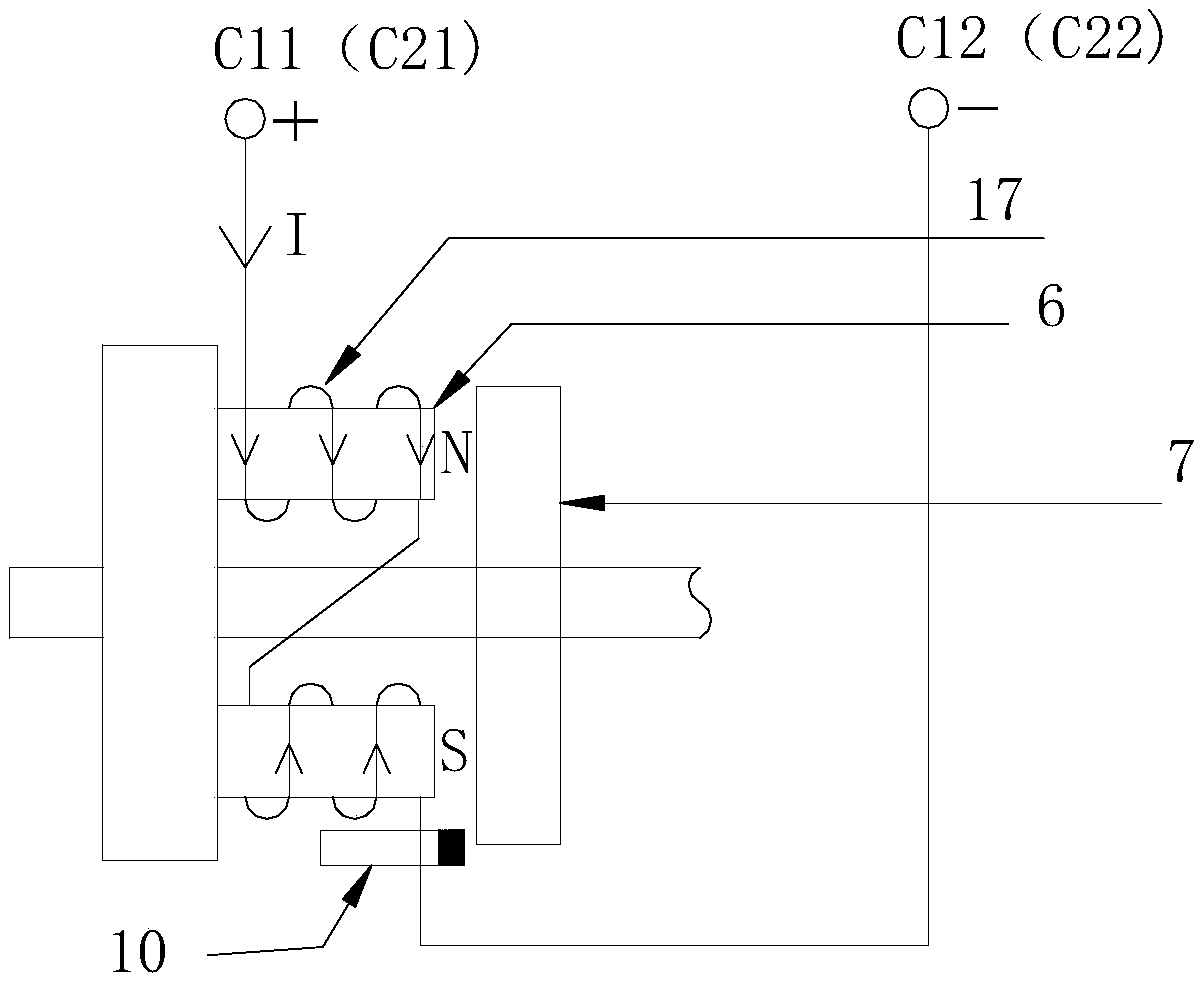
[0028] Such as figure 1 , Figure 4 As shown, a five-degree-of-freedom magnetic suspension bearing dual reverse complementary electric excitation controller includes a motor, left and right magnetic suspension bearings located on both sides of the motor, a microprocessor 13, and first to fifth displacement differential amplifiers 11-1 to 11- 5. Isolation drive circuit 14, excitation power circuit 15, excitation winding, keyboard and display; the left magnetic suspension bearing is provided with first to fourth displacement sensors along its radial direction, which are respectively used to measure the first to fourth quadrants of the left magnetic suspension bearing The radial displacement signal of the left magnetic suspension bearing is equipped with a left axial displacement sensor along its axial direction, which is used to measure the axial displac...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More