

Method for constructing three-dimensional map by mobile robot in unknown environment
A mobile robot, three-dimensional map technology, applied in the direction of instruments, non-electric variable control, two-dimensional position/channel control, etc., can solve the problem of not considering the overall coverage exploration of guiding mobile robots, and it is difficult to achieve rapid exploration and map construction in three-dimensional environment, etc. problems to ensure completeness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0066] 1. System framework for autonomous exploration and 3D map construction
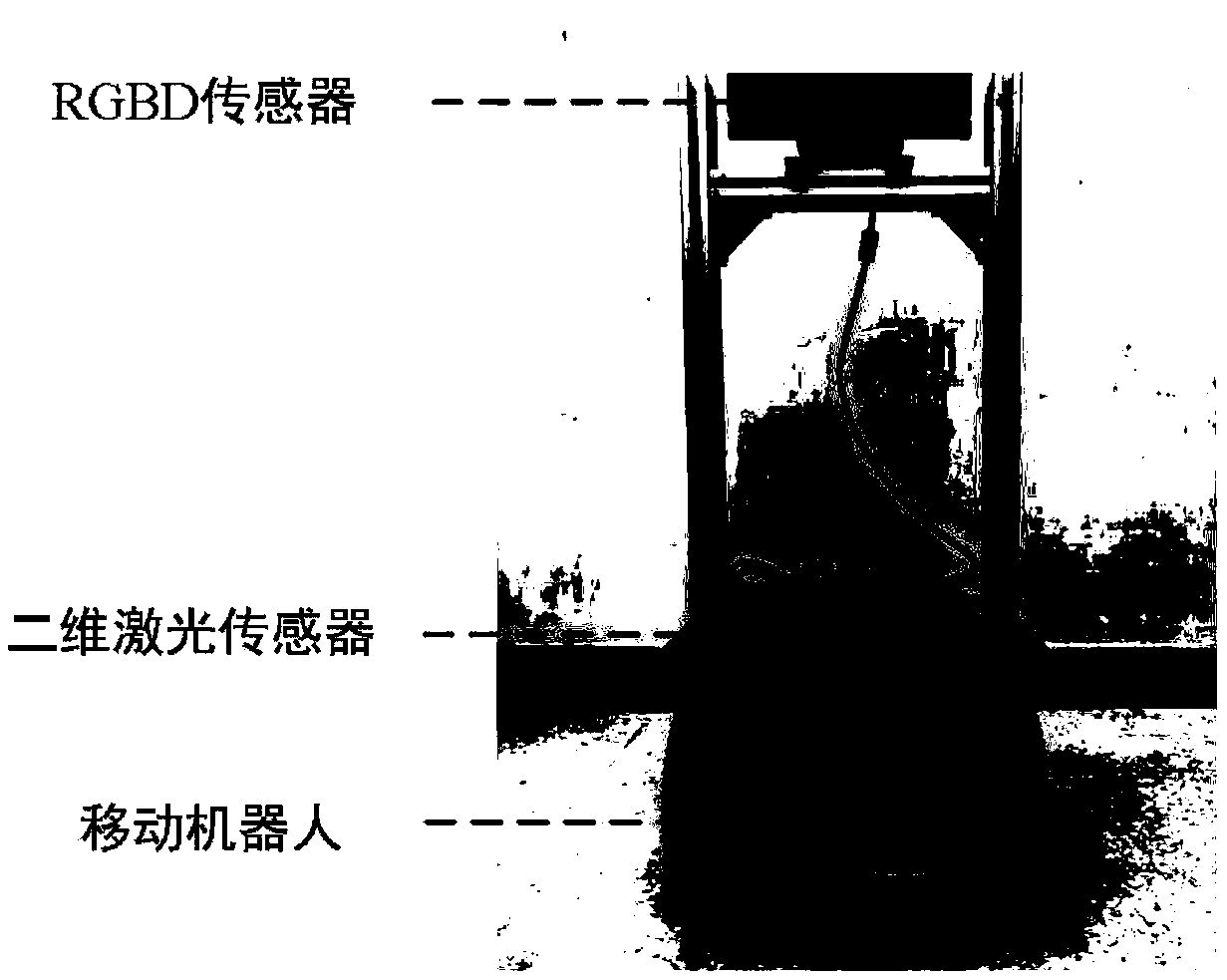
[0067] The present invention uses the Pioneer3DX mobile robot experiment platform equipped with a 2D Hokuyo UTM-30LX two-dimensional laser sensor and a Microsoft Kinect2.0 three-dimensional RGBD sensor. figure 2 . Kinect2.0 sensor field of view [a] v ,a h ]=[70°,60°], effective sensing distance range [d min , d max ]=[0.1m, 4.5m]. The computing platform is a MSI notebook equipped with 16GB RAM and Intel Core i7 multi-core processor, and Ubuntu 16.04 system and ROSkinetic robot operating system are installed. The proposed method is written in C / C++.
[0068] The present invention carries out independent exploration and three-dimensional map construction experiments in an indoor unknown laboratory environment. The plane area is length × width = 12.5m × 7.8m, and the Kinect2.0 camera is installed on the fixed height plane h of the robot body c = 0.8m above (see figure 2 ), the camera beam can...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More