

SLAM back-end trajectory optimization method based on loop detection
A trajectory optimization and loopback technology, applied in two-dimensional position/channel control, non-electric variable control, instruments, etc., can solve problems such as large amount of calculation, low optimization efficiency, large resource consumption, etc., to ensure accuracy and improve calculation. Efficiency, solve the effect of poor online real-time performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] The accompanying drawings are for illustrative purposes only and cannot be construed as limiting the patent;
[0051] In order to better illustrate this embodiment, some parts in the drawings will be omitted, enlarged or reduced, and do not represent the size of the actual product;
[0052] For those skilled in the art, it is understandable that some well-known structures and descriptions thereof may be omitted in the drawings.
[0053] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and embodiments.
[0054] This embodiment provides a SLAM back-end trajectory optimization method based on loop closure detection.
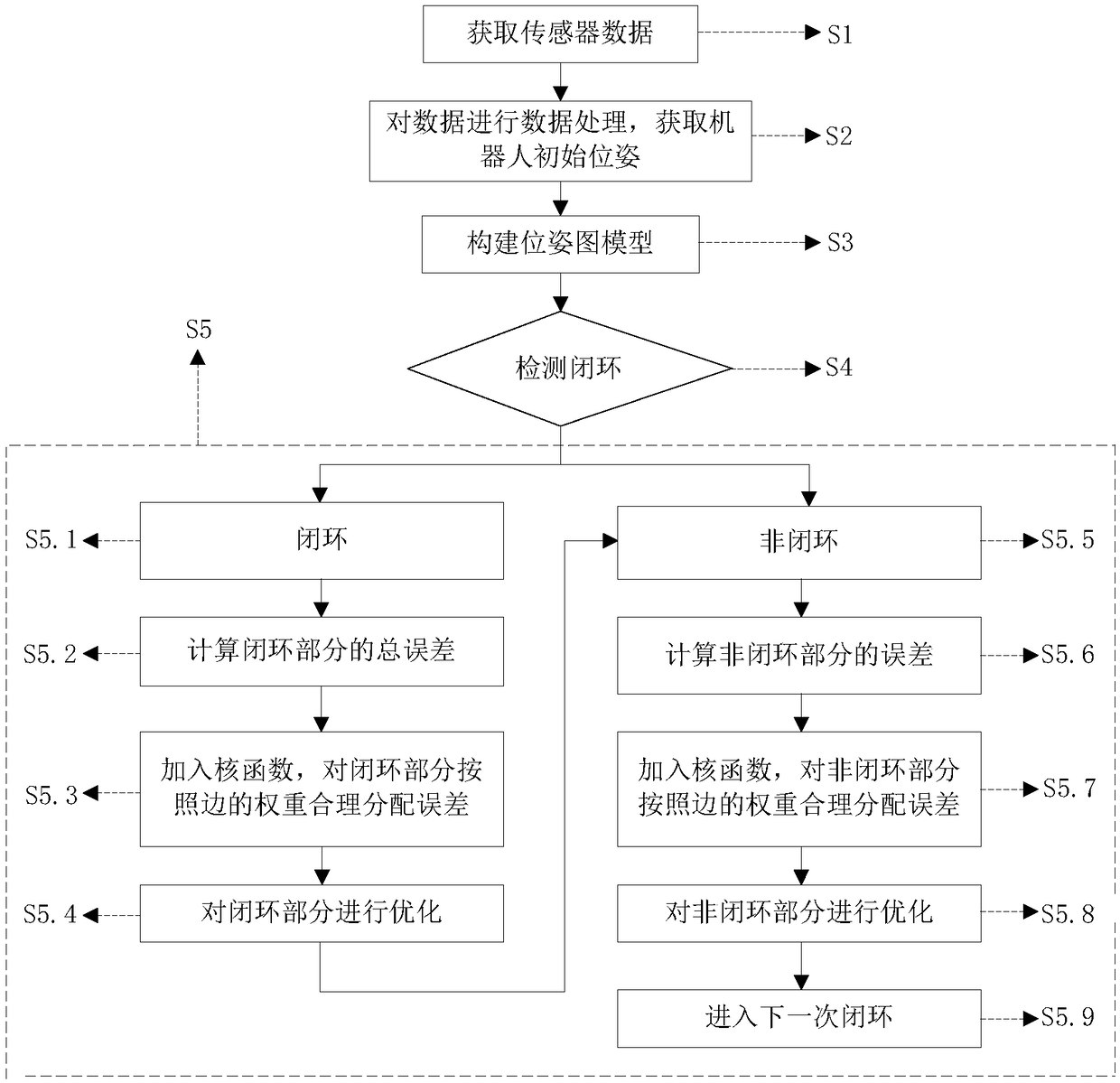
[0055] The method comprises the steps of:
[0056] S1: Obtain sensor data;
[0057] S2: Perform data processing on the data acquired by S1 to obtain the initial pose of the robot;
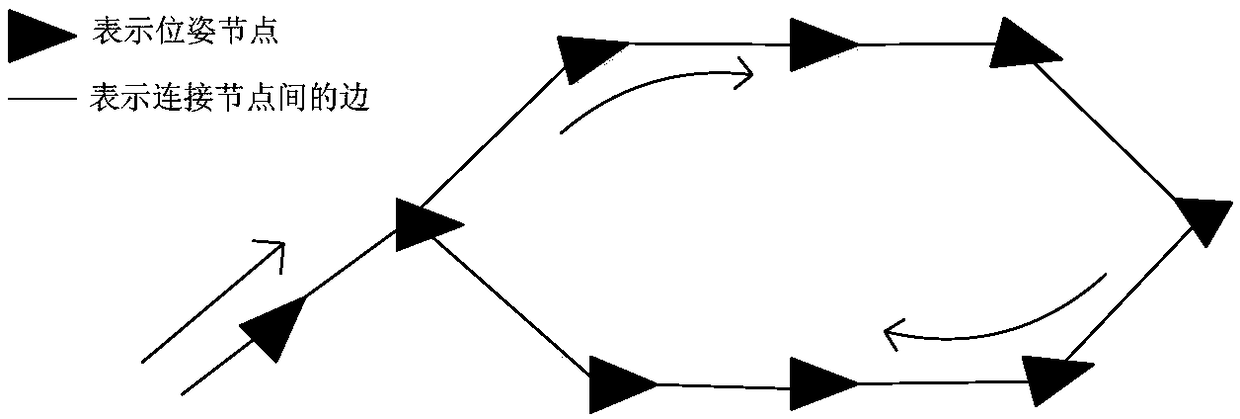
[0058] S3: Construct a pose graph model through the initial pose obtained in S2;
[0059] S4: Pe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More