Automatic yarn loading and unloading method and system
An automatic loading and unloading, yarn technology, applied in the direction of program control manipulators, manufacturing tools, manipulators, etc., can solve the problems that the degree of automation affects the development of the textile industry, the labeling process is time-consuming and laborious, and the labeling workload is large, and achieves automation and intelligence. Time-saving and labor-saving, high degree of automation and intelligence, and the effect of promoting development
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0054] The yarn automatic loading and unloading method provided in this embodiment includes the following steps:
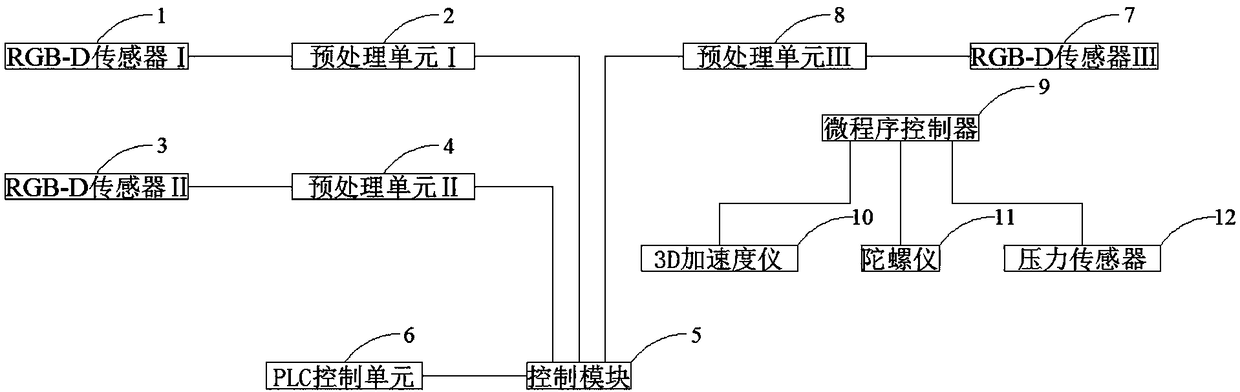
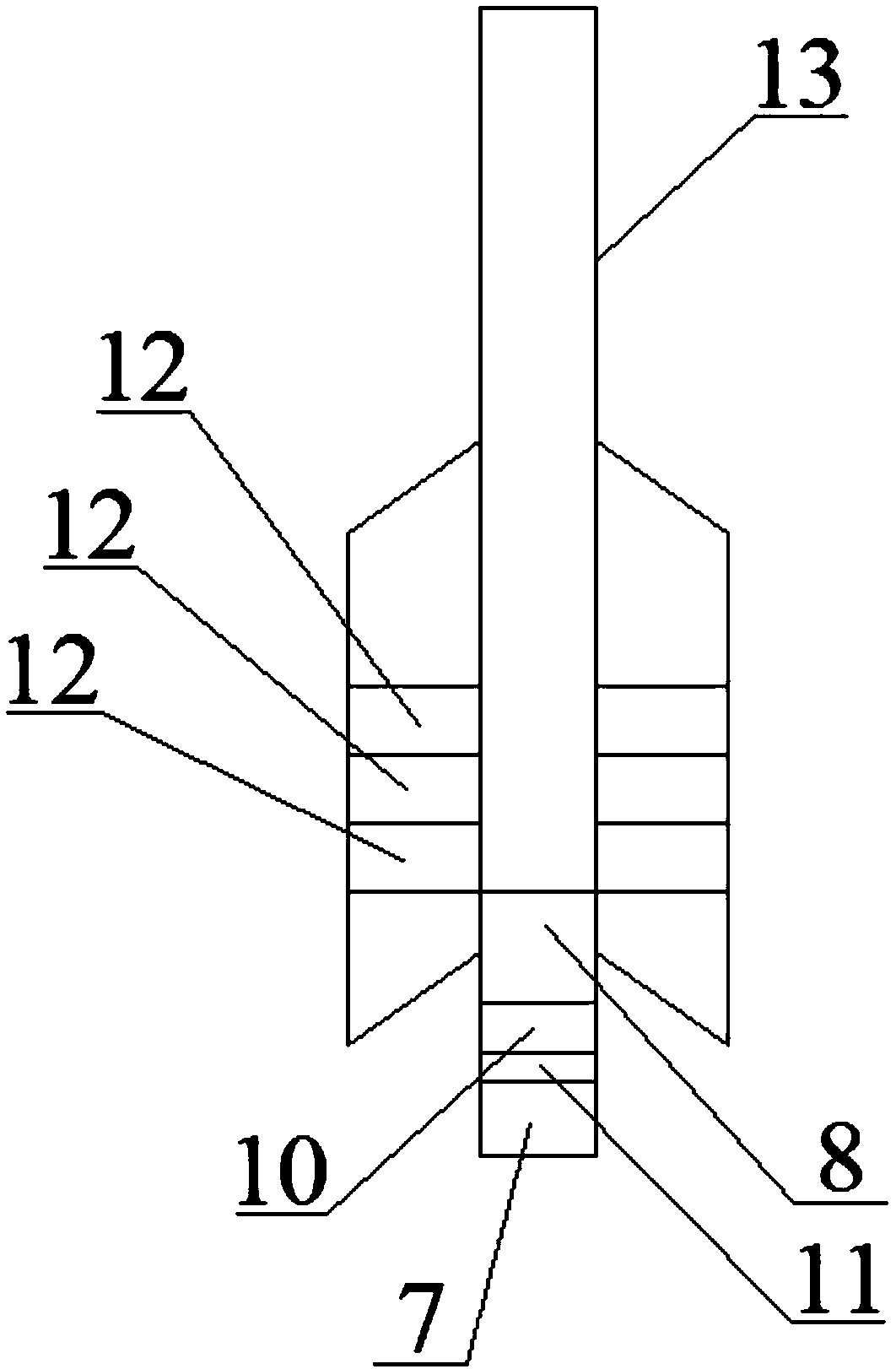
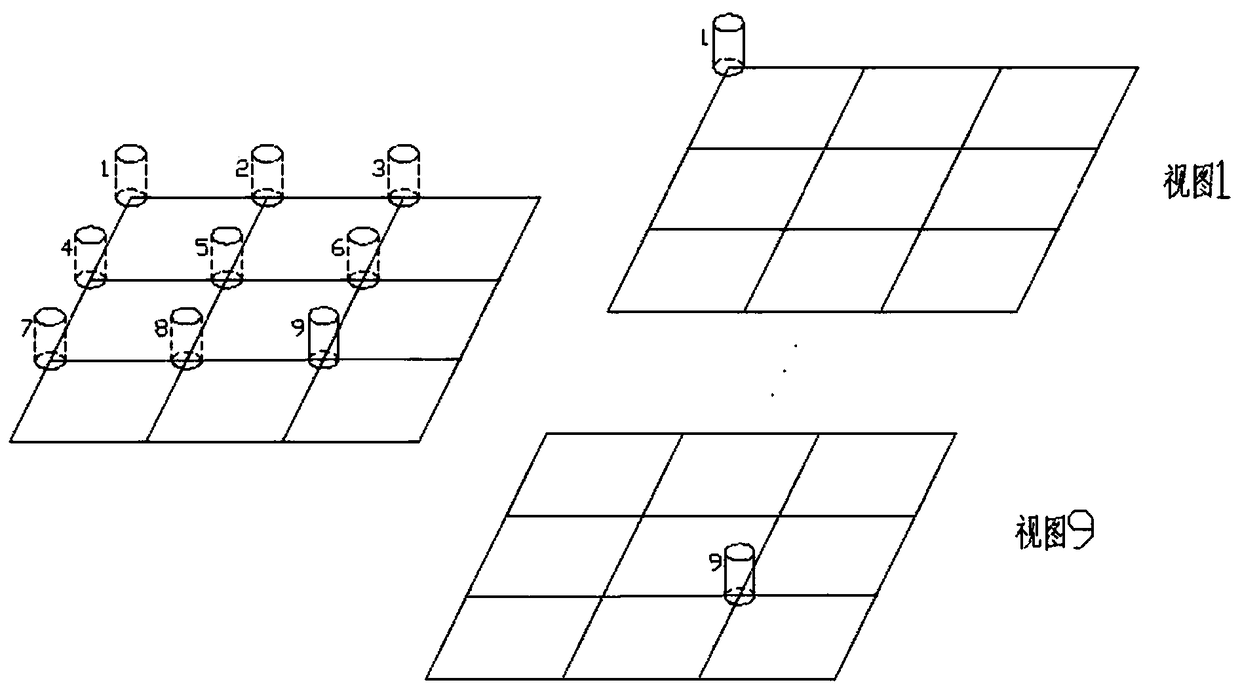
[0055] S1: The robot clamp (ie, the end gripping part of the robot) moves the yarn to a number of calibration points (set randomly in advance), and uses n image acquisition devices to collect the yarn depth images of each calibration point. These n image acquisitions The device can completely cover the entire active area of the robot.
[0056] S2: Each image acquisition device extracts the yarn point cloud data set in its corresponding local coordinate system from its respective depth image.
[0057] S3: Perform preprocessing on each yarn point cloud data collection. Preprocessing includes the following methods or a combination of methods.
[0058] Remove points that have no physical meaning or are not connected to any objects; remove scene data that has nothing to do with the task performed by the robot; remove moving points that do not match the known motion of the ro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com