

Radar and photoelectric rotary table based target detection method in movable unmanned platform
A technology of unmanned platforms and photoelectric turntables, which is applied in the field of image processing, can solve the problems of increasing the probability of target missed detection, lack of UAV path planning, lack of system and robustness, etc., to reduce the target missed detection rate, reduce the Target false detection rate, energy and time saving effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
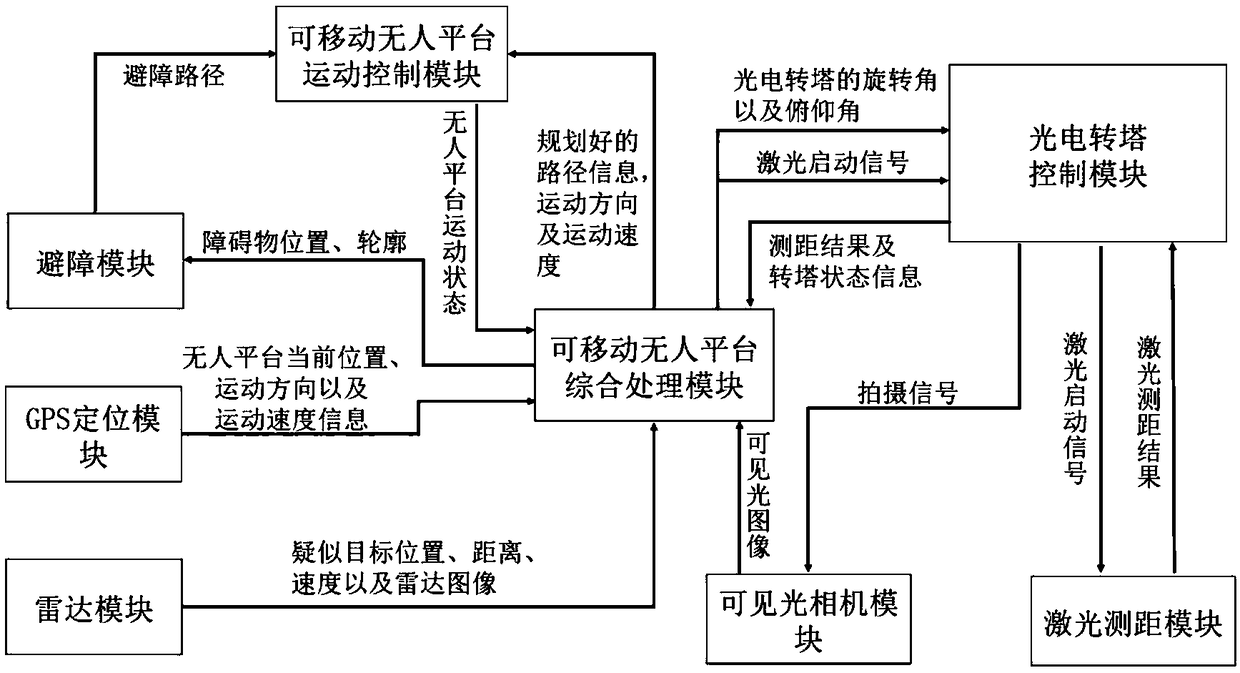
[0043] Such as figure 1 As shown, the unmanned platform used in the present invention includes a comprehensive processing module, a radar module, a laser ranging module, a GPS positioning module, an obstacle avoidance module, a motion control module, a photoelectric turntable module and a visible light camera module mounted on the photoelectric turntable and Laser ranging module. in:
[0044] The radar module is used to obtain the position information of the suspected target point and the radar image;
[0045] Laser ranging module, used to detect the physical distance between objects;
[0046] GPS positioning module, used to obtain the location information and motion status of the unmanned platform in real time;
[0047] The obstacle avoidance module, combined with the obstacle information obtained from the comprehensive processin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More