

Cruiser and navigation and obstacle avoidance method thereof
A patrol car and obstacle avoidance technology, applied in the field of robotics, can solve problems such as high labor costs and inability to meet security needs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
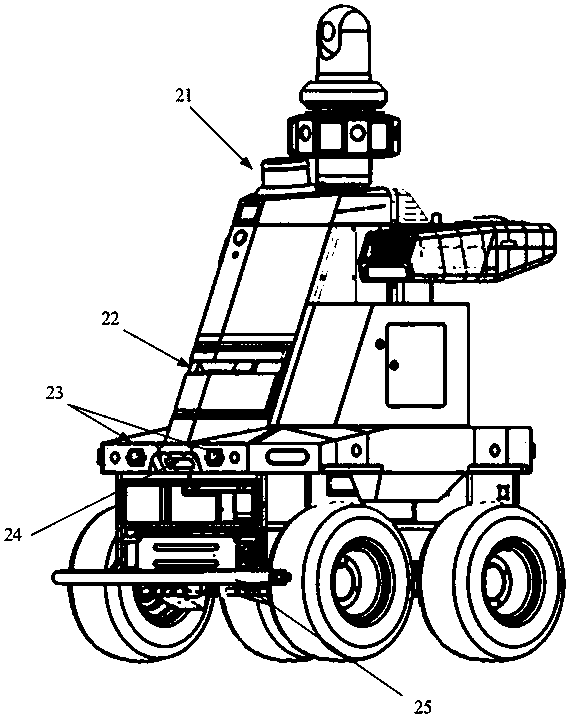
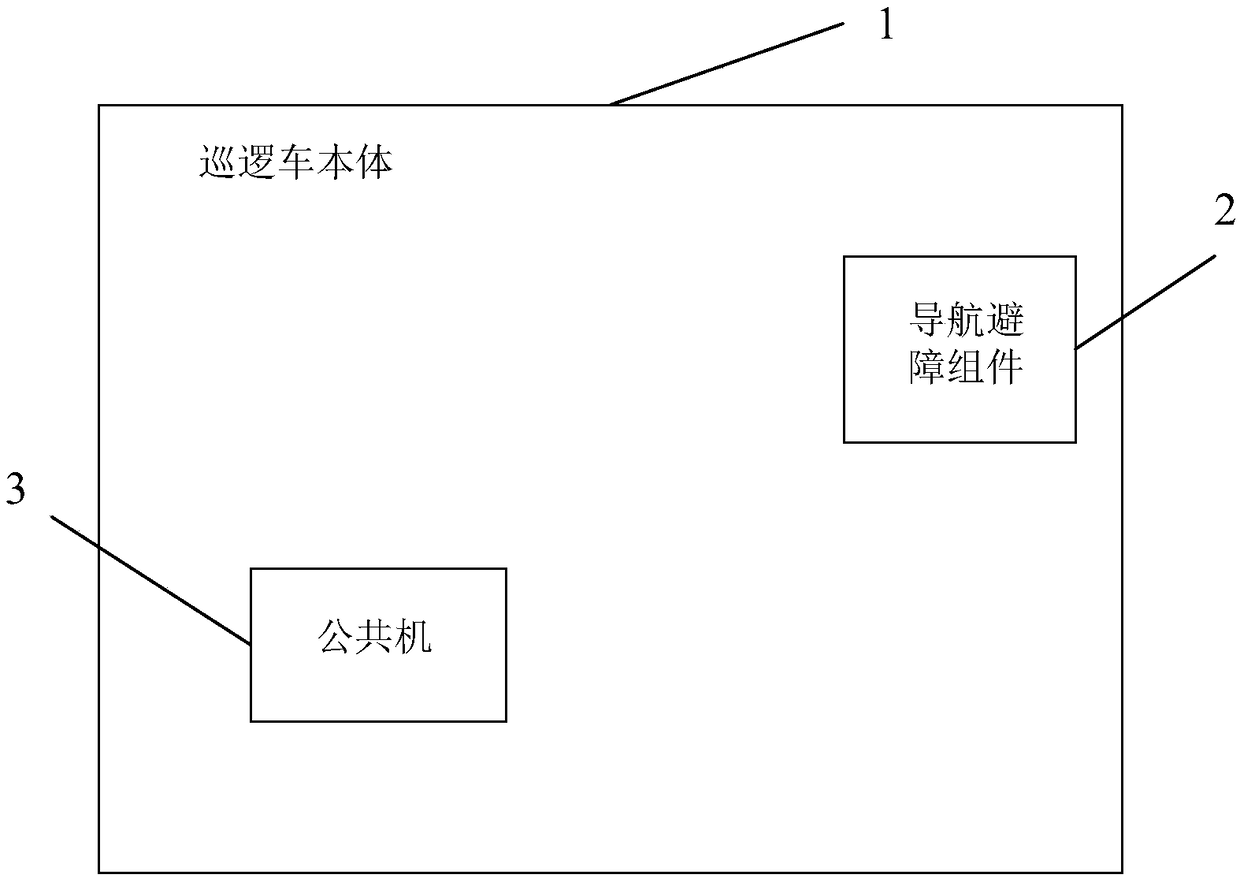
[0027] figure 1 It is a structural diagram of a patrol car provided by an embodiment of the present invention, including a patrol car body 1 , a navigation obstacle avoidance component 2 and a public machine 3 arranged on the patrol car body 1 .
[0028] Wherein, the navigation and obstacle avoidance component 2 includes a variety of sensors for collecting environmental information around the patrol car body 1 and transmitting it to the public machine 3, wherein the environmental information includes scenery, buildings, road conditions, etc. around the patrol car, Preferably, the environment information also includes at least pedestrian information or obstacle information around the patrol car.
[0029] The public machine 3 is used for navigation and positioning, route planning, obstacle avoidance or corresponding dynamic decision-making according to the acquired environmental information. For example, the public machine 3 constructs a map according to the received environment...
Embodiment 2
[0038] Figure 4 It is a flow chart of the navigation and obstacle avoidance method of the patrol car provided by the embodiment of the present invention. This embodiment can be applied to the situation where the patrol car performs navigation and obstacle avoidance based on multiple sensors, and is executed by the public aircraft on the patrol car, wherein the patrol car The vehicle navigation obstacle avoidance method mainly includes the following steps:
[0039] S210. Acquire environmental information around the patrol car collected by the navigation obstacle avoidance component, wherein the navigation obstacle avoidance component includes various sensors, and the environment information includes at least pedestrian information or obstacle information around the patrol car.
[0040] In the embodiment of the present invention, the navigation obstacle avoidance component is composed of various sensors, including at least 3D laser radar, 2D laser radar sensors, ultrasonic rada...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More