

A method for calculating the d-coordinate of the intersection of the optical axis and the celestial sphere based on a star sensor
A technology of star sensor and celestial coordinate system, which is applied in the field of astronomical navigation, can solve the problems of difficulty in establishing the attitude determination mode of the vehicle, and it is difficult to overcome the reference vector, etc., and achieve the effect of realizing high-precision attitude measurement, simplifying calculation and improving accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The principles and features of the present invention are described below in conjunction with the accompanying drawings, and the examples given are only used to explain the present invention, and are not intended to limit the scope of the present invention.
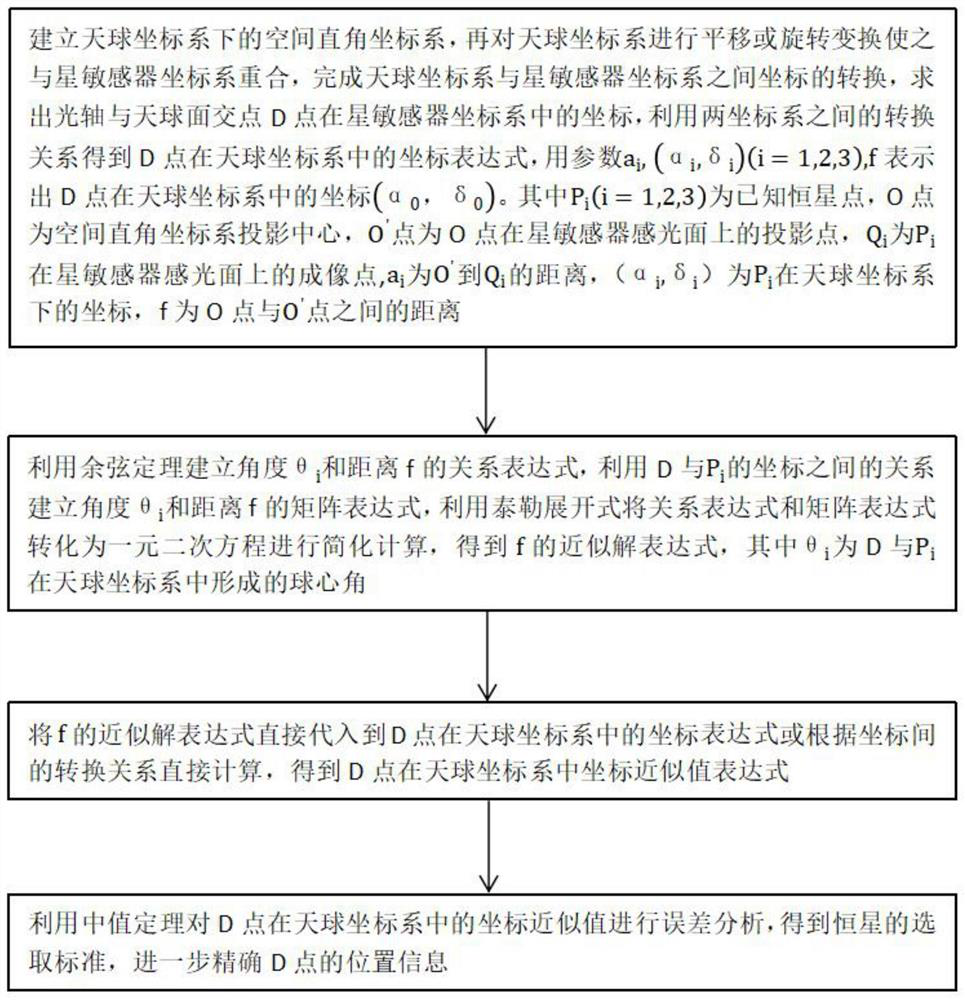
[0021] like figure 1 As shown, a calculation method based on the D coordinate of the intersection point of the optical axis of the star sensor and the celestial sphere comprises the following steps:
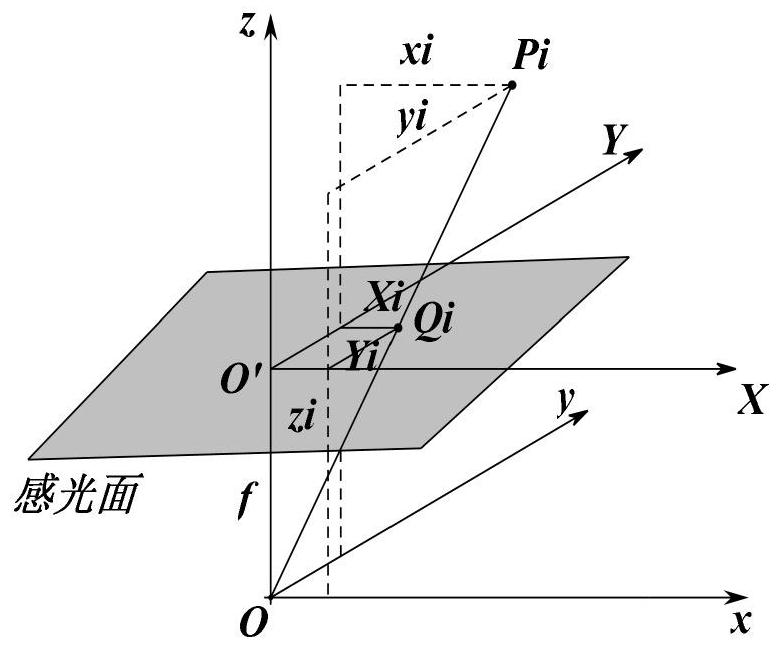
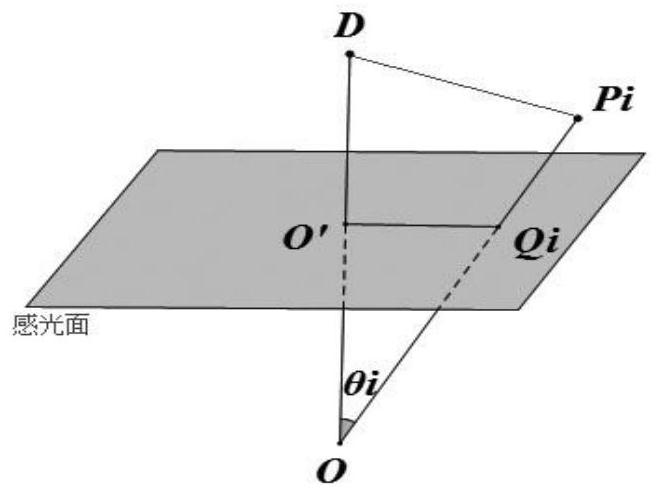
[0022] Step S1, establish a space Cartesian coordinate system under the celestial coordinate system, and then translate or rotate the celestial coordinate system so that it coincides with the star sensor coordinate system, and complete the coordinate conversion between the celestial coordinate system and the star sensor coordinate system, Calculate the coordinates of point D in the star sensor coordinate system, use the conversion relationship between the two coordinate systems to obtain the coordinate expression of po...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More