

Compact format model-free adaptive course control algorithm of fusion neural network PD used for ship
A model-free self-adaptive, neural network technology, applied in attitude control, non-electric variable control, control/regulation system, etc., can solve the problems of ship heading system overshoot, oscillatory system, nonlinearity, etc., to improve the response speed , Reduce the effect of system overshoot and time-consuming adjustment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0025] The present invention will be further described below in conjunction with accompanying drawing:
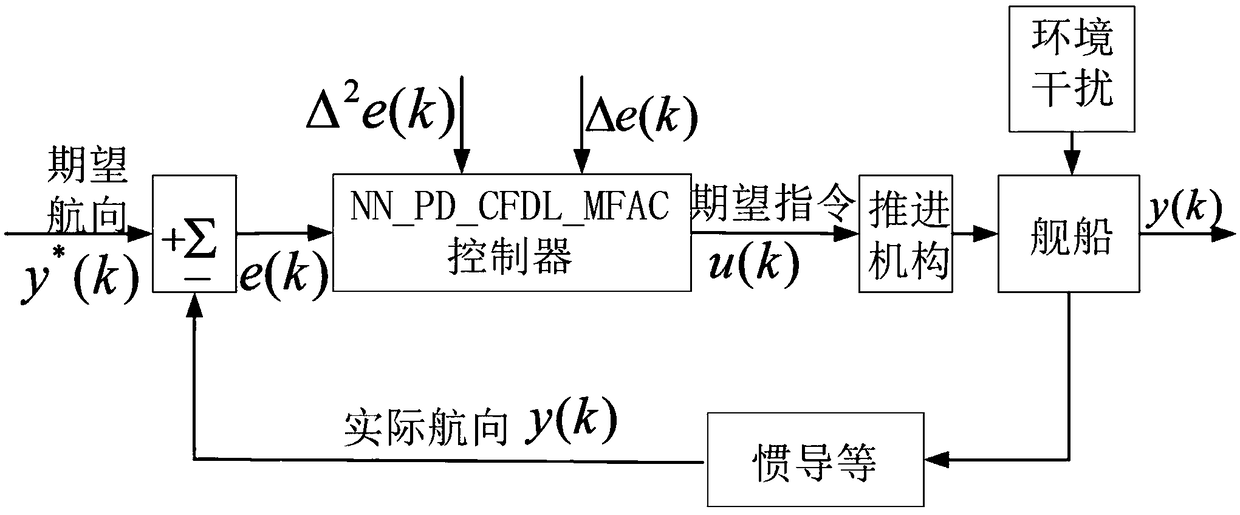
[0026] as attached figure 1 As shown, it is the overall block diagram of the heading system of the present invention. First, the command of the desired heading y(k)* is given, and e(k) is calculated according to the ship heading of the kth, k-1, and k-2 control cycles , Δe(k), Δ 2 e(k) is used as the input of the NN_PID_CFDL_MFAC controller, and the NN_PD_CFDL_MFAC controller solves the current expected input quantity u(k) of the ship heading system. The control mechanism executes the expected input command, updates the actual heading of the ship system, and sets k=k+1 to update e(k), Δe(k), Δ 2 e(k) is input to the NN_PD_CFDL_MFAC controller, and the above process is repeated, so that the actual heading of the ship converges to the desired heading.
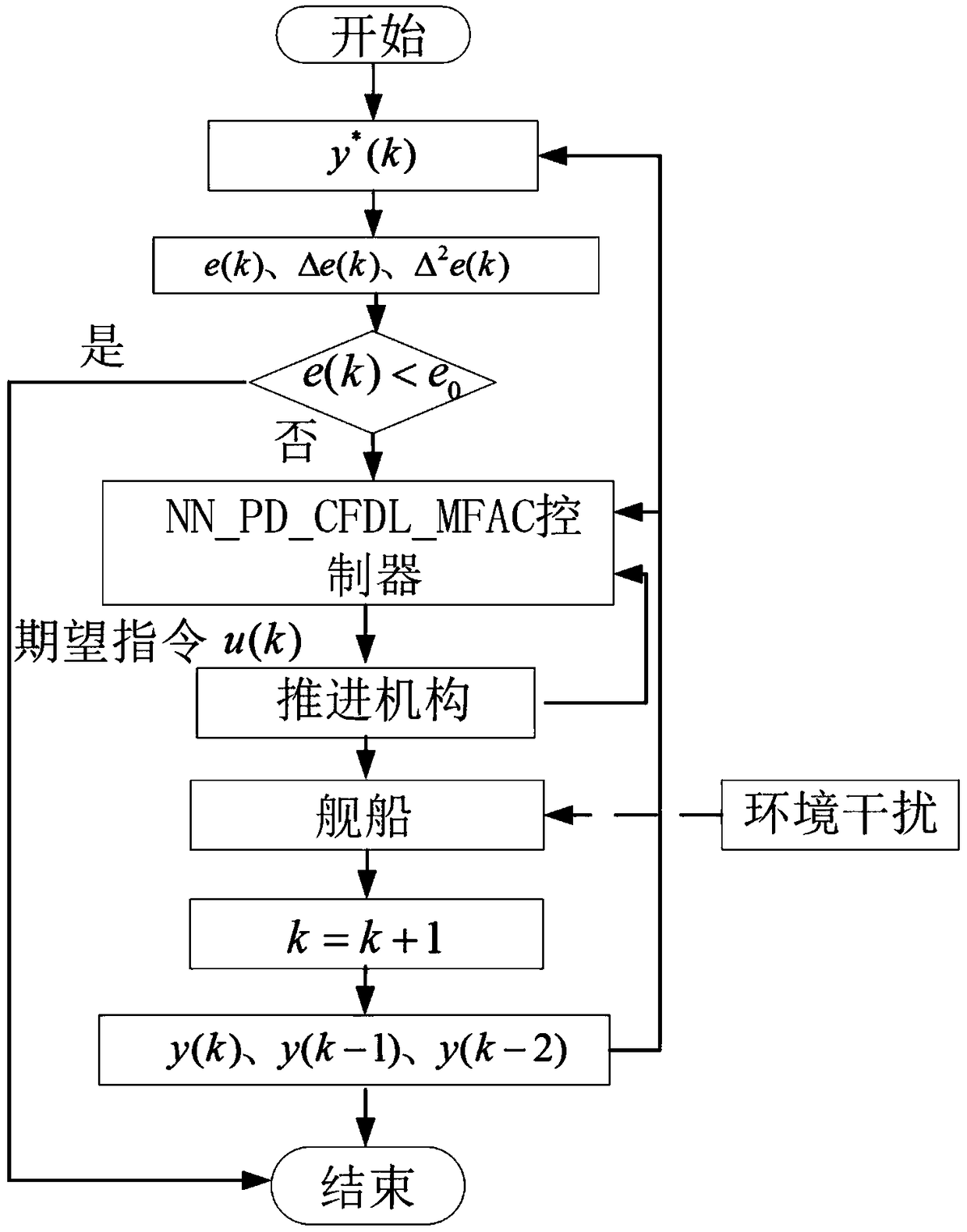
[0027] as attached figure 2 Shown is the system flowchart of the present invention, specifically comprises the followin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More