Novel anthropomorphic mechanical arm shoulder joint
A technology of robotic arm and shoulder joint, applied in the field of shoulder joint design of anthropomorphic robotic arm, can solve the problems of small obstacle avoidance range, small shoulder joint force and torque, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
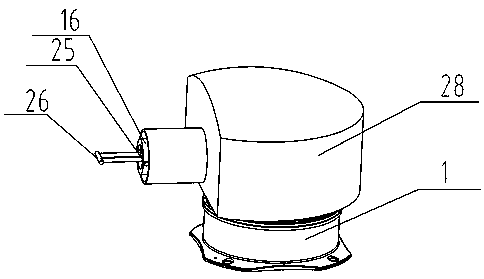
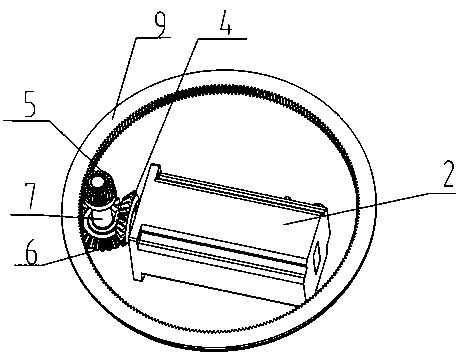
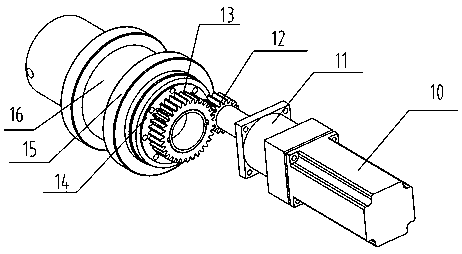
[0014] Figure 1 to Figure 8 The embodiment of the present invention is jointly described. In this example, in order to realize the three-degree-of-freedom movement of the shoulder joint of the mechanical arm, the movement mode of the first degree of freedom, the motor (2) Through the motor seat (3) is connected with the lower base (1), and the motor (2) with bevel gear (4) connected, bevel gear (4) with bevel gear (6) meshing, bevel gears (6) with spur gear (5) fixed on the same axis (7) upper, spur gear (5) meshes with the circular rack (9), and the circular rack (9) and the bearing (8) placed together on the lower base (1), the circular rack (9) is fixed to the upper base (28), and the rotation of the circular rack (9) drives the upper base (28) to rotate, and the degree of freedom Two motion modes, the upper base (28) passes through the motor seat (30) with motor (10) connected, motor (10) through the reducer (11) drive straight teeth ...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap