

Trace tracking method of autonomous vehicle
A technology of automatic driving and trajectory tracking, which is applied in the field of trajectory tracking of automatic driving vehicles, and can solve problems such as unsatisfactory trajectory tracking, many dynamic model parameters, and difficulty in ensuring real-time calculation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051] In the drawings, the same or similar reference numerals are used to denote the same or similar elements or elements having the same or similar functions. Embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings.
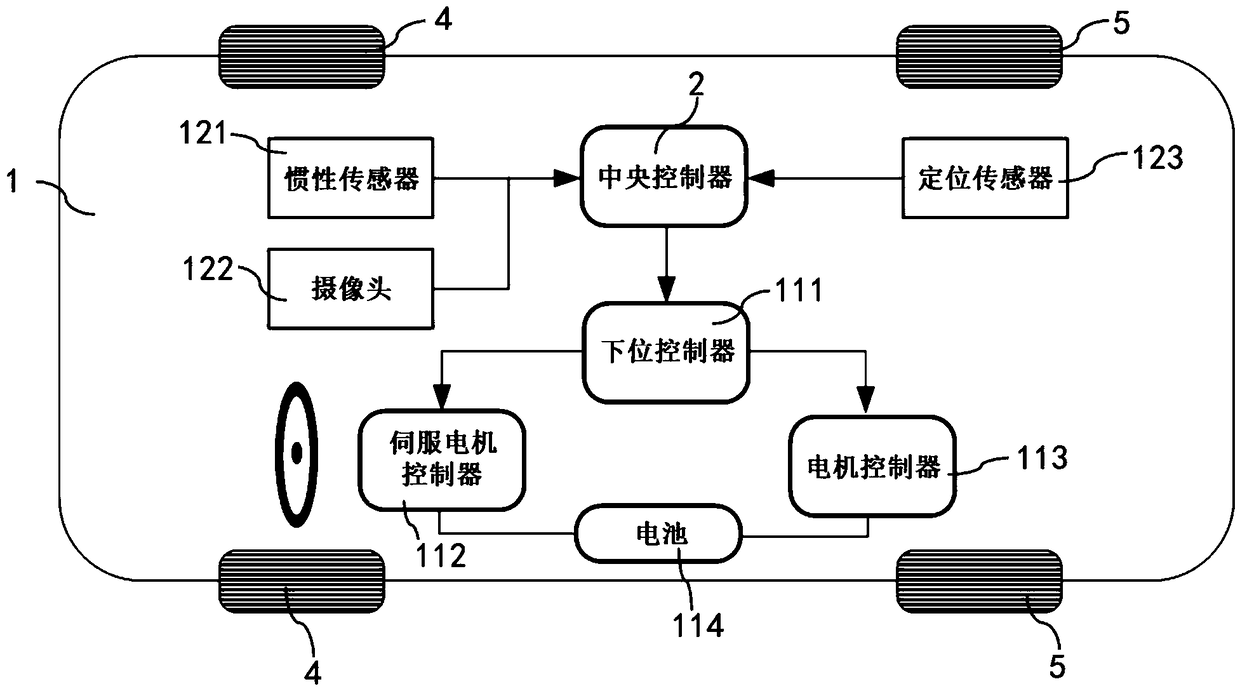
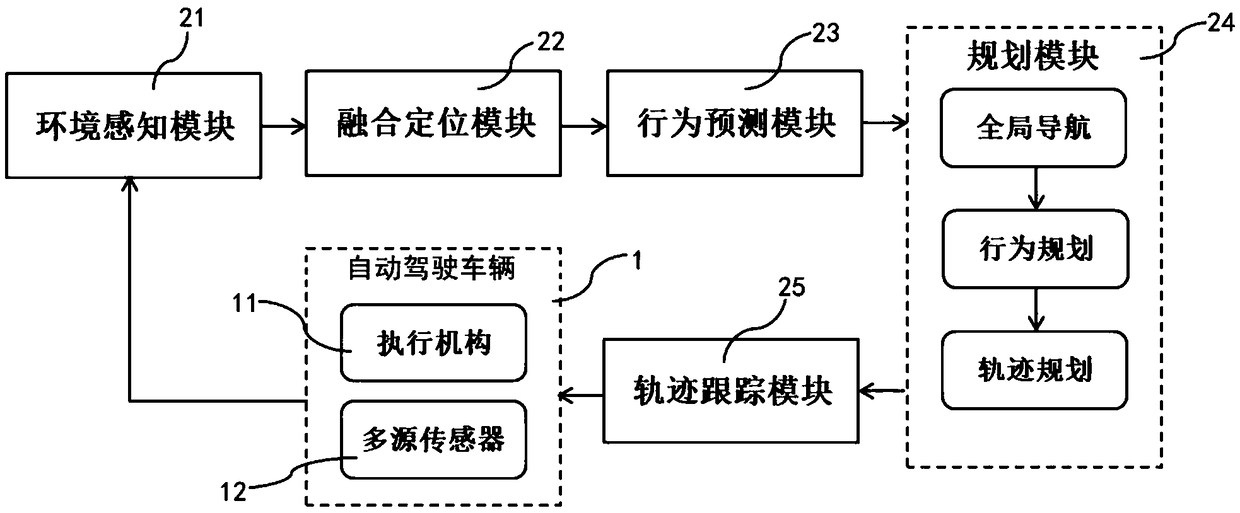
[0052] Such as figure 1 and figure 2 As shown, the automatic driving vehicle trajectory tracking system provided in this embodiment is used to control the automatic driving vehicle 1 equipped with an actuator 11 and a multi-source sensor 12, wherein:
[0053] The actuator 11 includes a lower controller 111 , a servo motor controller 112 , a motor controller 113 and a battery 114 , wherein the lower controller 111 may be an Arduino controller, but is not limited thereto. The lower controller 111 communicates with the servo motor controller 112 , and the lower controller 111 outputs the front wheel rotation angle control amount to the servo motor controller 112 for controlling the rotation angle of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More