

A trajectory recovery method based on depth learning and Kalman filter correction
A technology of Kalman filter and recovery method, applied in the field of trajectory recovery based on deep learning and Kalman filter correction, can solve the problems of modeling trajectory, unable to display modeling spatiotemporal information, difficult to explain deep learning model, etc. The effect of improving space-time efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0095] The technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some of the embodiments of the present invention, not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without creative work all belong to the protection scope of the present invention.
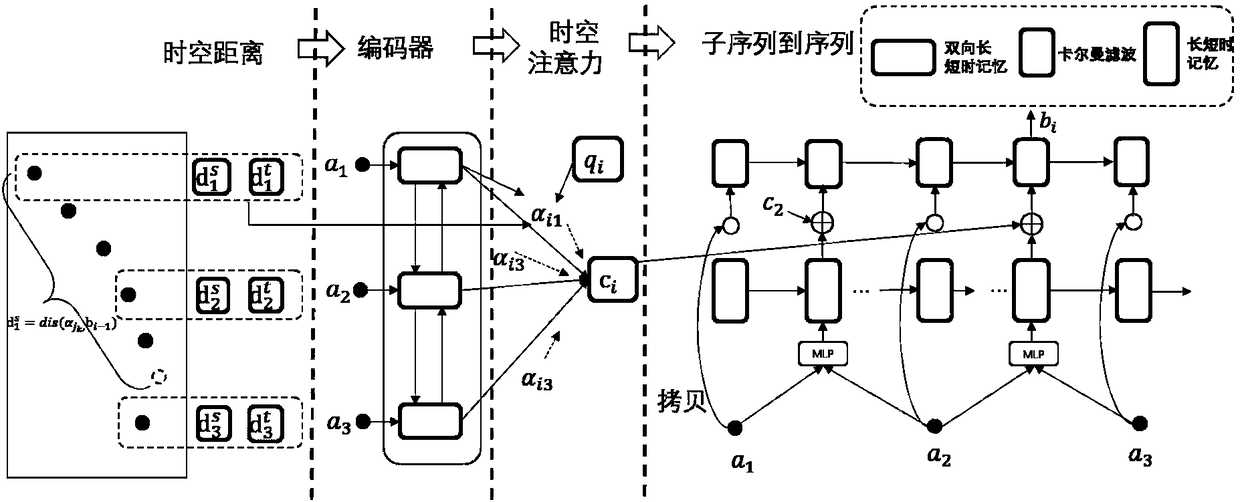
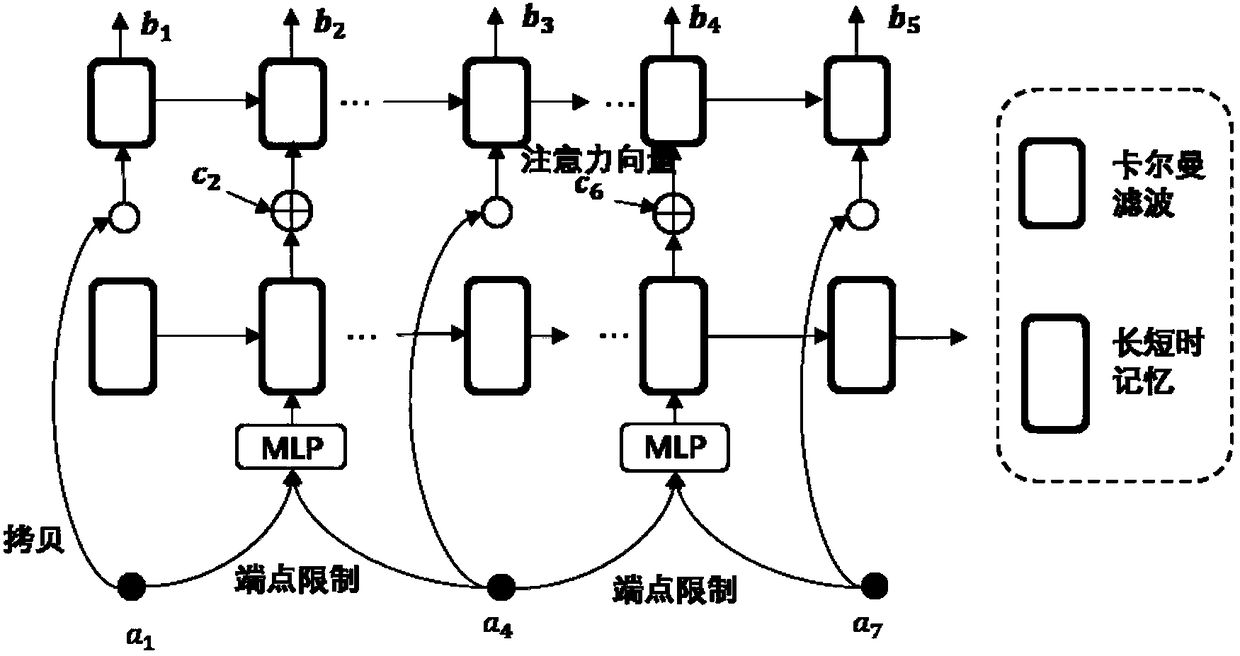
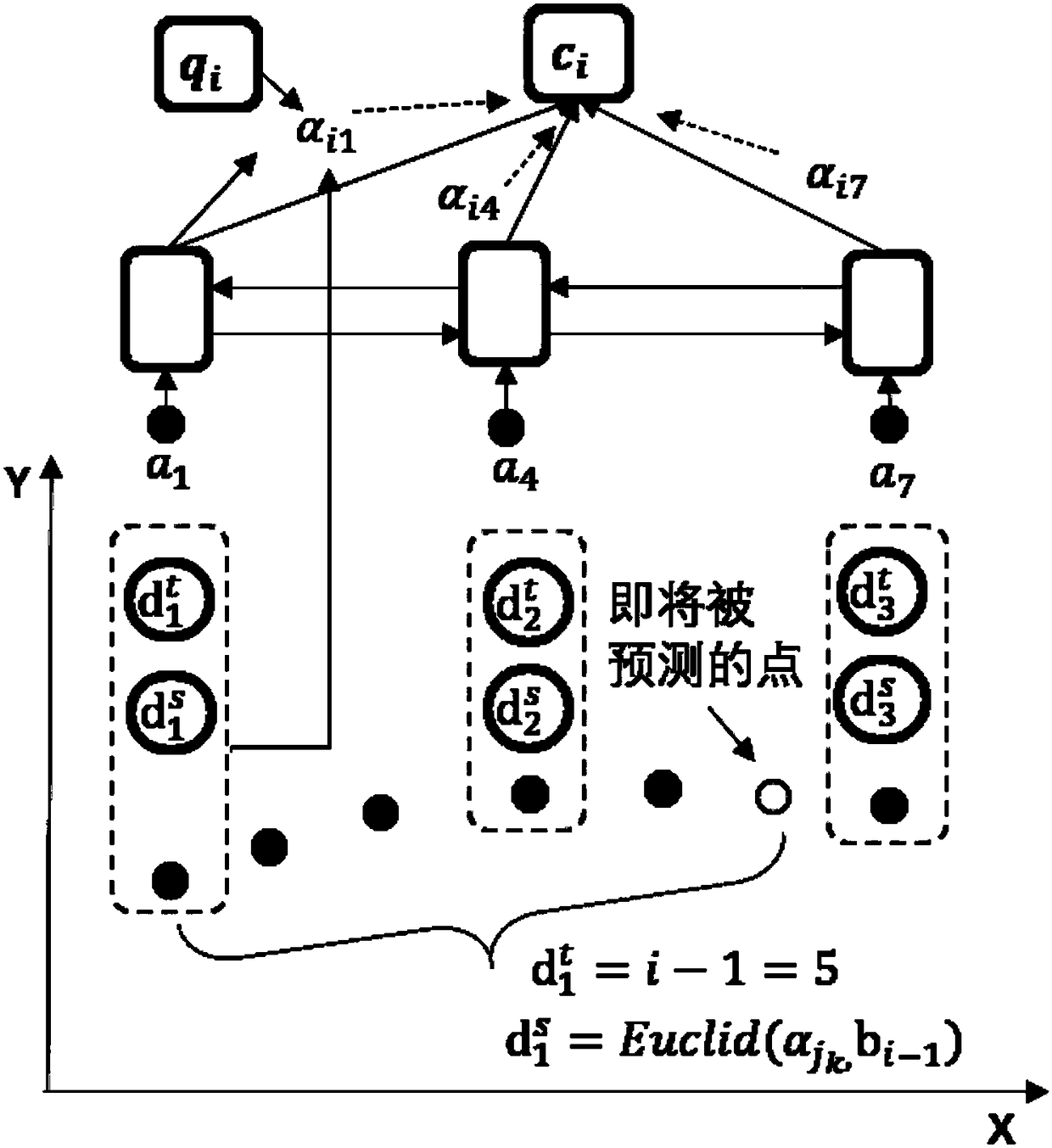
[0096] The embodiment of the present invention discloses a trajectory recovery method based on deep learning and Kalman filter correction, which uses a recurrent neural network to model the transfer law between trajectory points, and uses the attention mechanism in deep learning to help track recovery. Finally, Kalman filtering is introduced to model the movement of objects in time and space, which reduces the uninterpretable and error of the deep learnin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More