

A bionic wall-climbing robot with self-adaptive wall roughness combined with rigidity and softness combined with wet suction feet
A wall roughness and wall-climbing robot technology, applied in the field of bionics, can solve problems such as difficult generalization and complex control methods, and achieve the effects of simple control, easy implementation, and convenient personalized design.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The present invention will be further described below in conjunction with the embodiments shown in the accompanying drawings.
[0043] The invention provides a bionic wall-climbing robot with self-adaptive wall roughness, rigid and soft combined with wet suction feet.
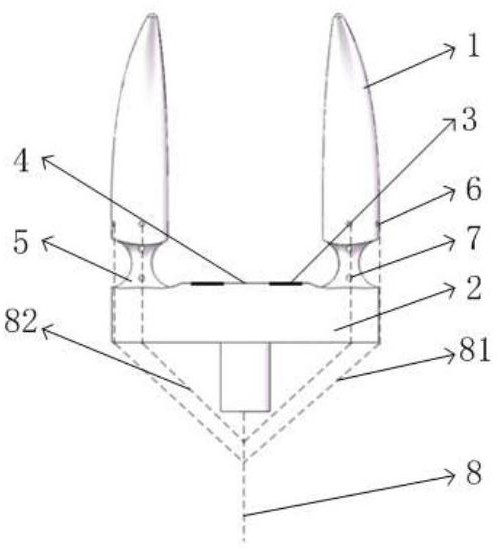
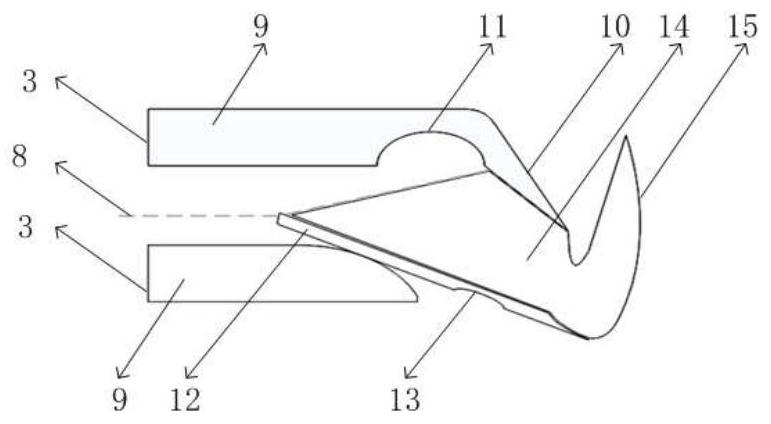
[0044] Such as figure 1 and 2 Shown, tendon 8 is main power transmission mechanism of the present invention: figure 1 The lateral movement tendon branch 81 and the downward movement tendon branch 82 are respectively connected to the claw bottom multidirectional elliptical flexible hinge 5 through the claw bottom lateral movement threading hole 6 and the claw bottom downward movement threading hole 7; Through the tendon perforation 4 on the claw base 2, it is connected with the liquid storage chamber 14, the pawl sheet 12 and the vertical handle 10.
[0045] Such as figure 1 and 2 As shown, the foot pad part base 9 and the claw base 2 are connected at the bonding point 3 .
[0046] Such as figure 1...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More