

Multi-agent formation tracking control method and system
A tracking control and multi-agent technology, applied in control/adjustment system, non-electric variable control, three-dimensional position/channel control, etc., can solve problems such as unknown range, control deviation, system failure, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
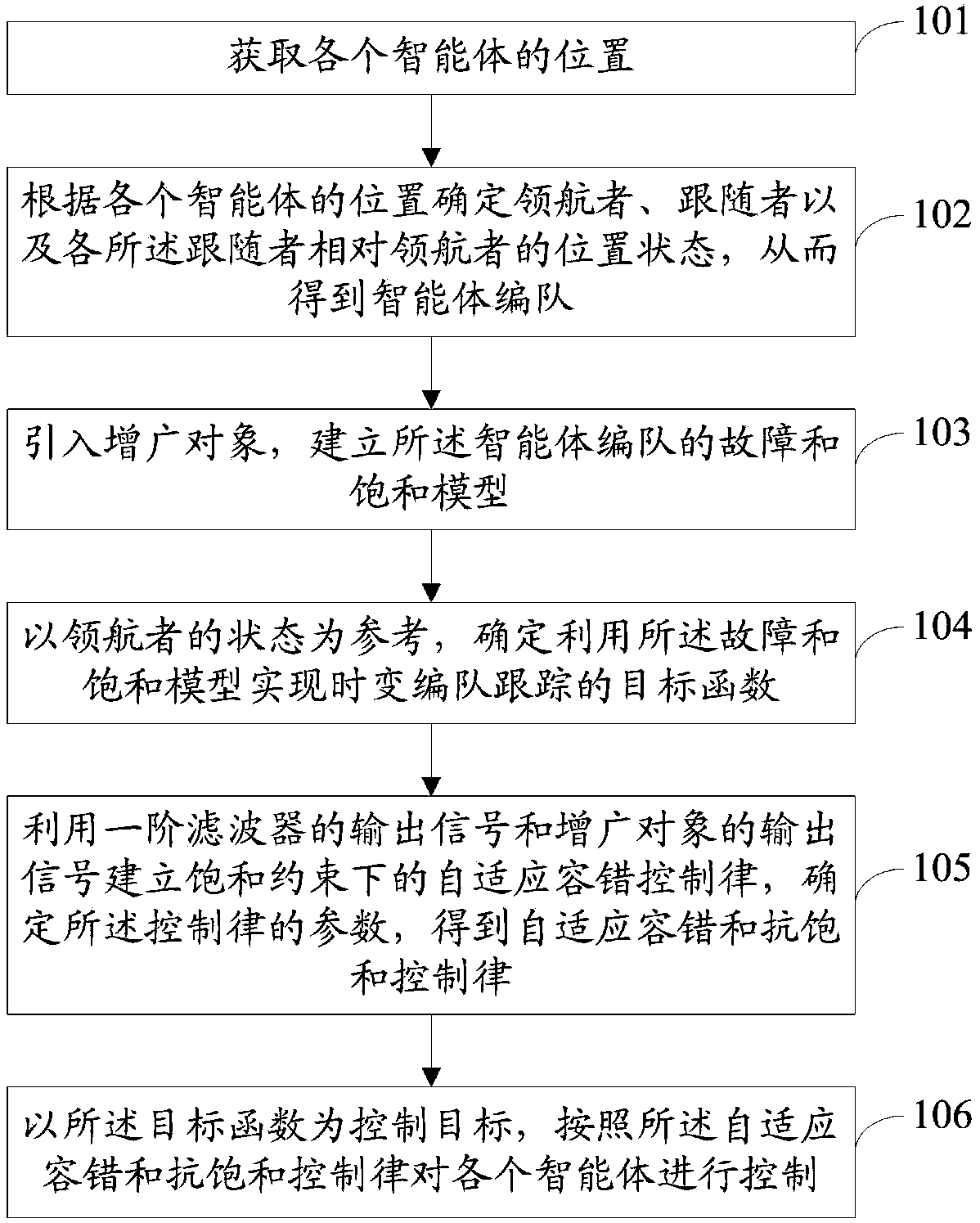
[0121] figure 1 It is a method flowchart of an embodiment of the multi-agent formation tracking control method of the present invention.
[0122] see figure 1 , the multi-agent formation tracking control method, including:
[0123] Step 101: Obtain the position of each agent;
[0124] Step 102: Determine the leader, the follower, and the position status of each follower relative to the leader according to the position of each agent, so as to obtain the formation of agents;
[0125] Step 103: introducing an augmented object to establish a failure and saturation model of the agent formation;
[0126] Step 104: Taking the state of the leader as a reference, determine the objective function for realizing time-varying formation tracking by using the fault and saturation model;
[0127] Step 105: Using the output signal of the first-order filter and the output signal of the augmented object to establish an adaptive fault-tolerant control law under saturation constraints, deter...
Embodiment 2
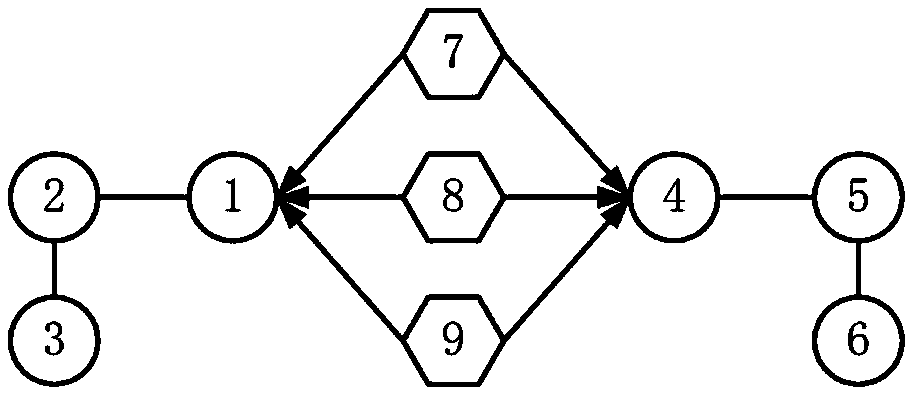
[0173] S1: Determine the follower and leader, and verify the connectivity of the communication topology
[0174] In a multi-agent system, if an agent has no neighbors, it is called a leader, otherwise it is called a follower. A follower is said to be sensitive if its neighbor set contains all leaders, and a follower is said to be insensitive if there is no leader in its neighbor set.
[0175] In order to ensure the consistency of the track tracking of multiple leaders by followers, it is necessary to verify that the communication topology satisfies the following connectivity conditions: for any follower, there are only two states: sensitive and insensitive. Communication between followers is undirected. For every insensitive follower, there must be a connection path between a sensitive follower and it.
[0176] In the actual formation application, if there is a situation where the follower is connected to some leaders and followers at the same time, then it should avoid acce...
Embodiment 3
[0262] Figure 10 It is a system structure diagram of the multi-agent formation tracking control system of the present invention.
[0263] see Figure 10 , the multi-agent formation tracking control system, including:
[0264] Obtaining module 1001, for obtaining the position of each agent;
[0265] The formation module 1002 is used to determine the position status of the leader, the follower and each follower relative to the leader according to the position of each agent, so as to obtain the formation of agents;
[0266] The modeling module 1003 is used to introduce augmented objects and establish failure and saturation models of the agent formation;
[0267] An objective function determination module 1004, configured to use the state of the leader as a reference to determine the objective function for realizing time-varying formation tracking by using the fault and saturation model;
[0268] The control law determination module 1005 is used to use the output signal of th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More