

A Method of Part Pose Acquisition Based on Geometric Primitives
An acquisition method and primitive technology, applied in the field of visual positioning, can solve the problems of large amount of calculation and low efficiency, and achieve the effect of improving accuracy and efficiency, and convenient matching.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
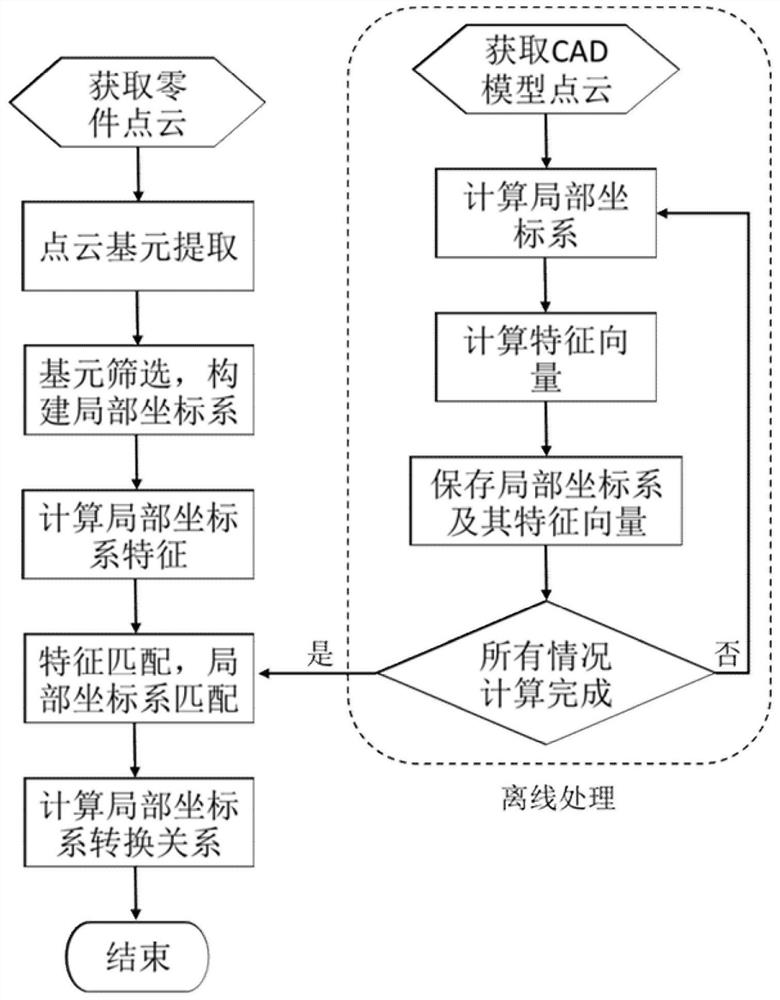
[0037] A method for obtaining the pose of a part based on geometric primitives in the present invention includes: obtaining point cloud data of the part through a three-dimensional point cloud scanning device, using the RANSAC algorithm to fit the plane and cylindrical surface in the point cloud; extracting the plane and cylindrical surface in the part A cylindrical surface whose axis is parallel to the normal vector of the plane, and construct a local coordinate system according to this positional constraint; local coordinate features can be established according to the positional relationship between primitives, and the part point cloud can be constructed on the model by matching the local coordinate features For the corresponding local coordinate system, the pose of the part point cloud can be obtained by solving the transformation relationship between the two local coordinate systems.
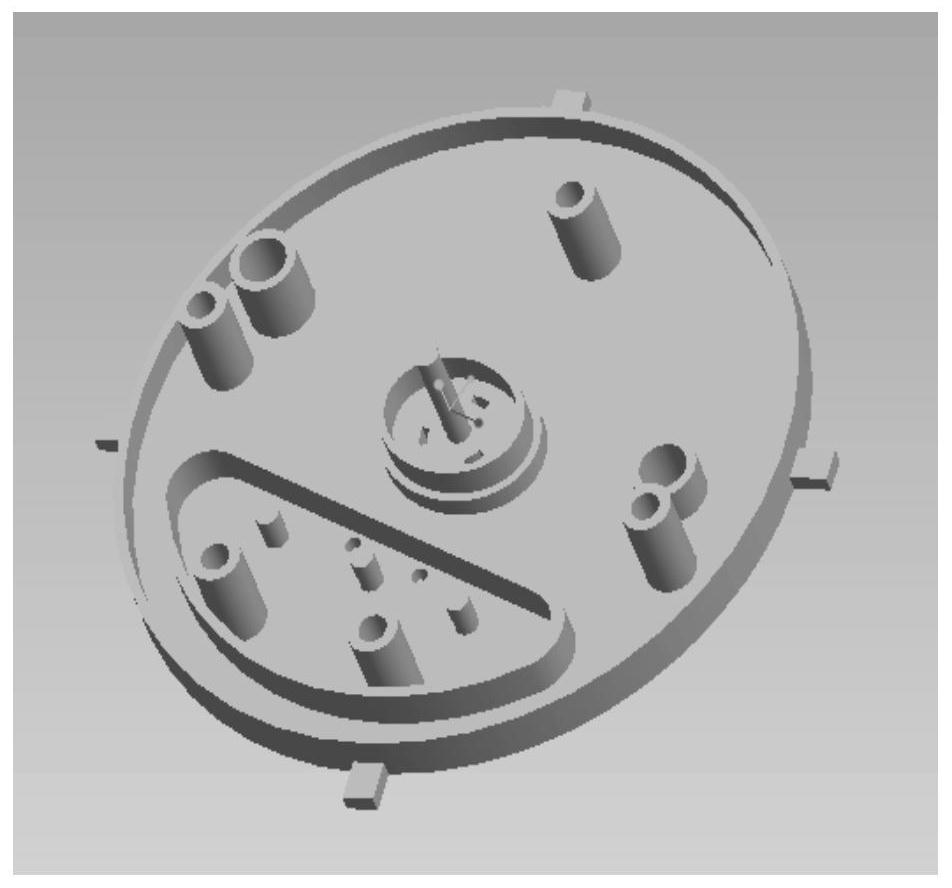
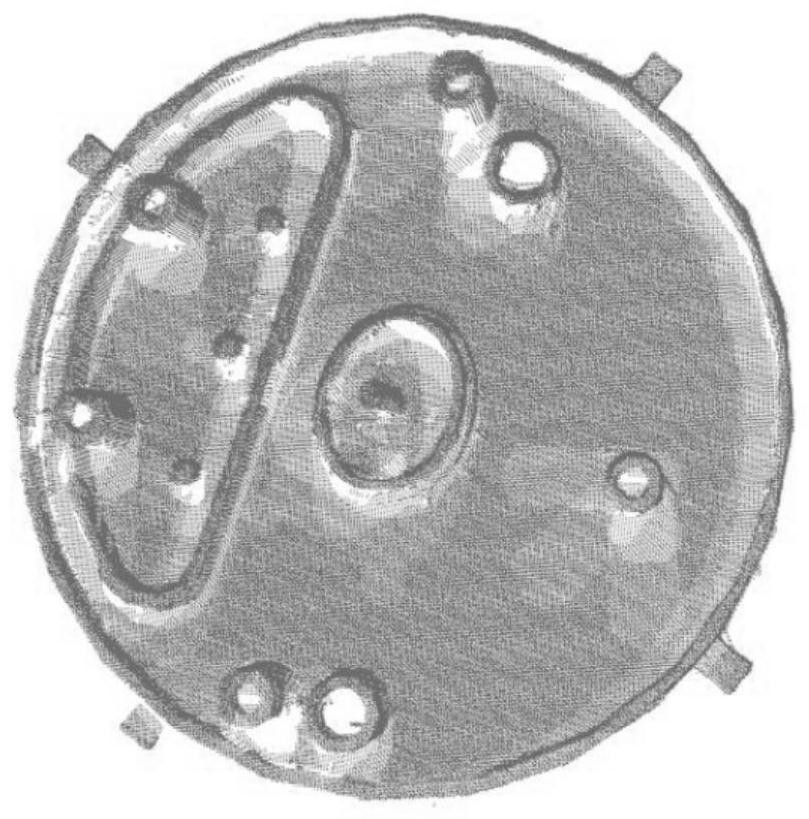
[0038] The following is an example of calculating the pose of shower parts. For the over...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More