

Self-adaptive vehicle following method for auxiliary driving of electric automobile
A technology for assisted driving and electric vehicles, applied in the direction of control devices, etc., can solve problems such as the inability to achieve coordinated optimization of multiple indicators
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0079] In order to make the technical problems, technical solutions and advantages to be solved by the present invention clearer, the following will describe in detail with reference to the drawings and specific embodiments.
[0080] Aiming at the problem that the existing cooperative optimization of multiple indicators cannot be realized, the present invention provides a Self-driving Electric Adaptive Tracking Control (S-EATC) method for assisted driving of electric vehicles.
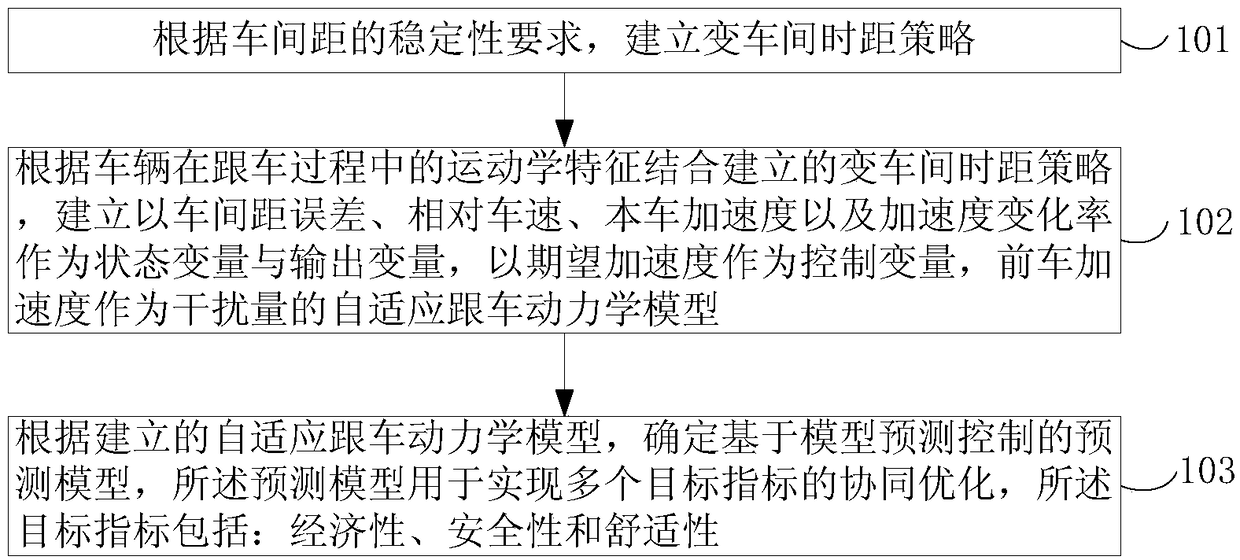
[0081] like figure 1 As shown, the self-adaptive car-following method for assisted driving of an electric vehicle provided in the embodiment of the present invention includes:
[0082] S101. Establishing a Variable Time Headway (VTH) strategy according to the stability requirement of the inter-vehicle distance;
[0083] S102. Based on the time-to-vehicle time-variable strategy established in combination with the kinematic characteristics of the vehicle in the process of following the vehicle, establis...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More