

Multi-agent event-driven formation control system and method
An event-driven, control system technology, applied in the direction of control/regulation system, non-electric variable control, three-dimensional position/channel control, etc., can solve the difficulty of applying research results to the actual control system, waste of system resources, and difficulty in obtaining intelligent agents Accurate models and other issues to achieve the effect of reducing communication resources and computing resources, reducing the number of formations, and relaxing the restrictions of the system model
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
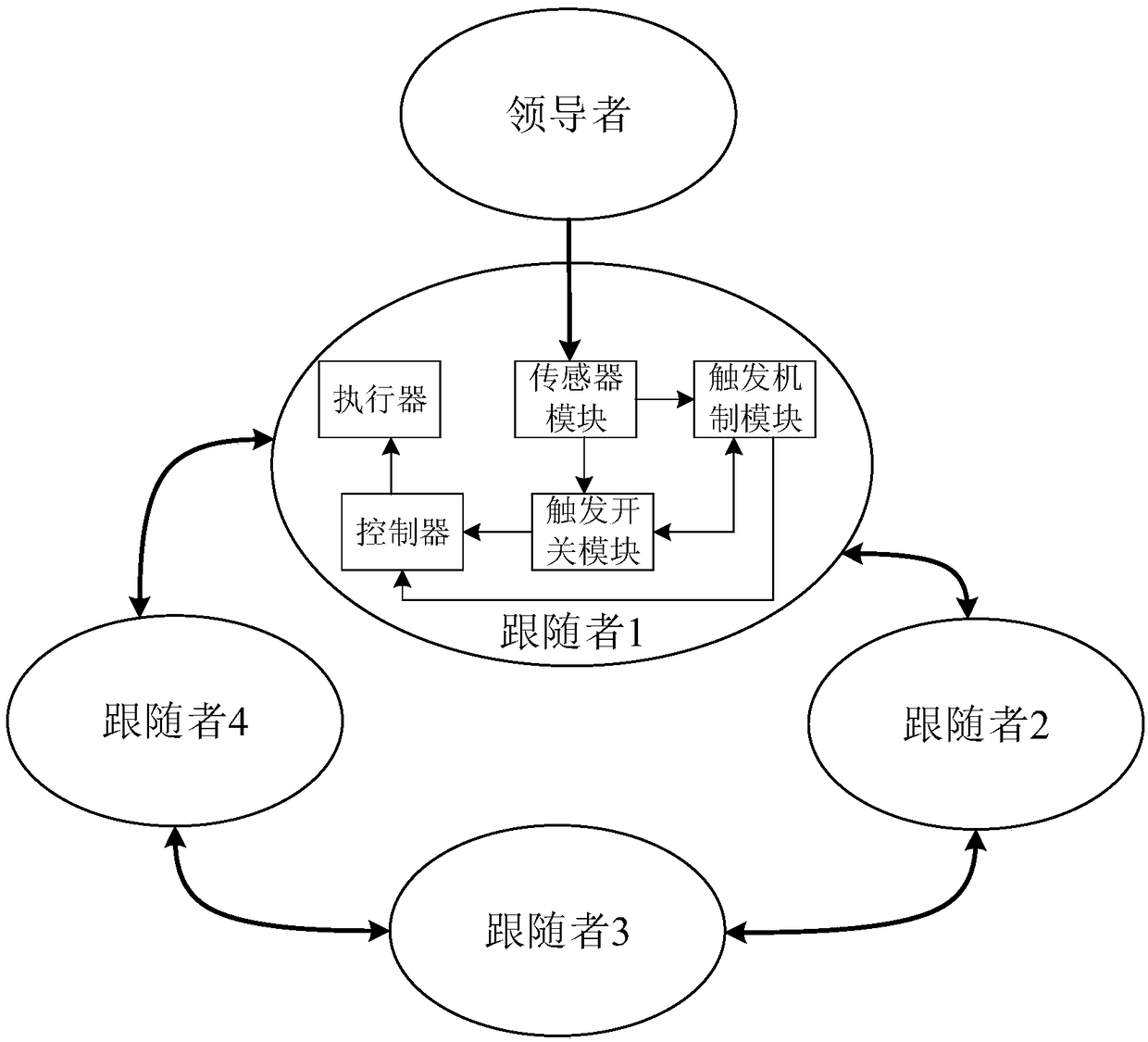
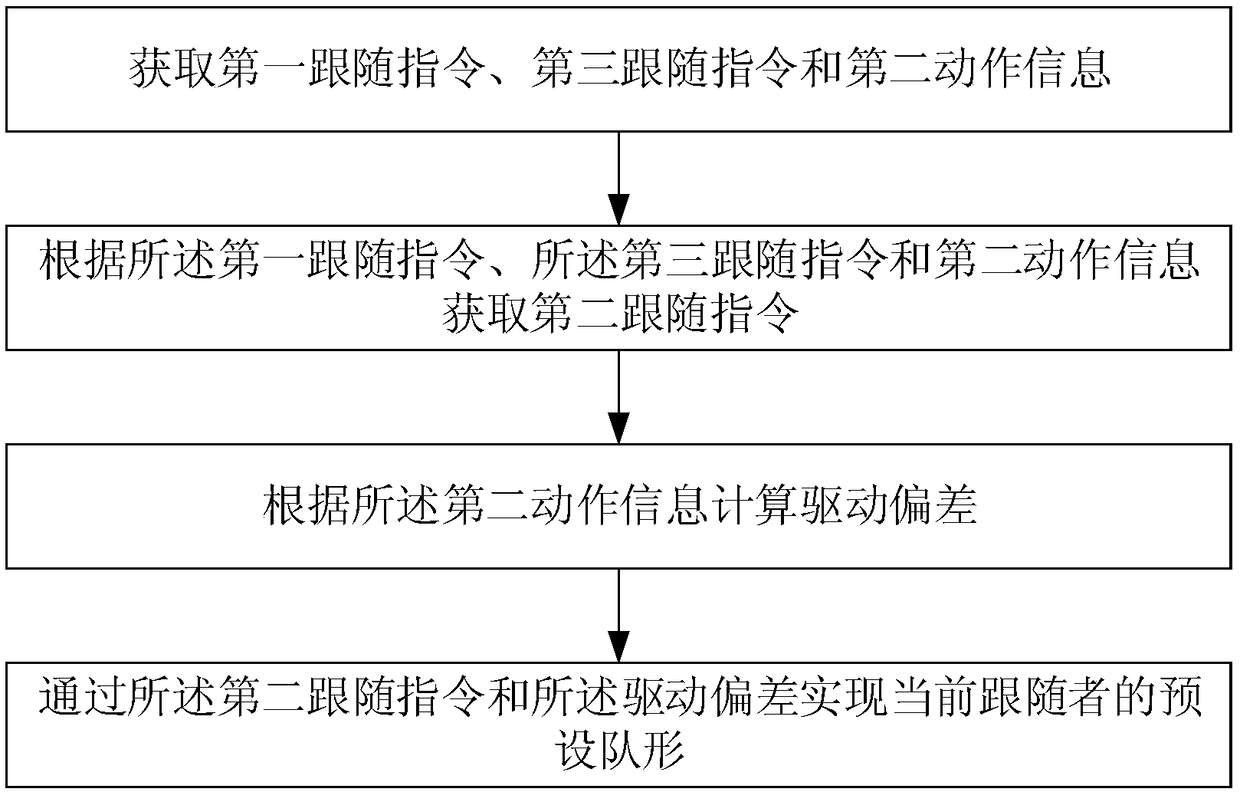
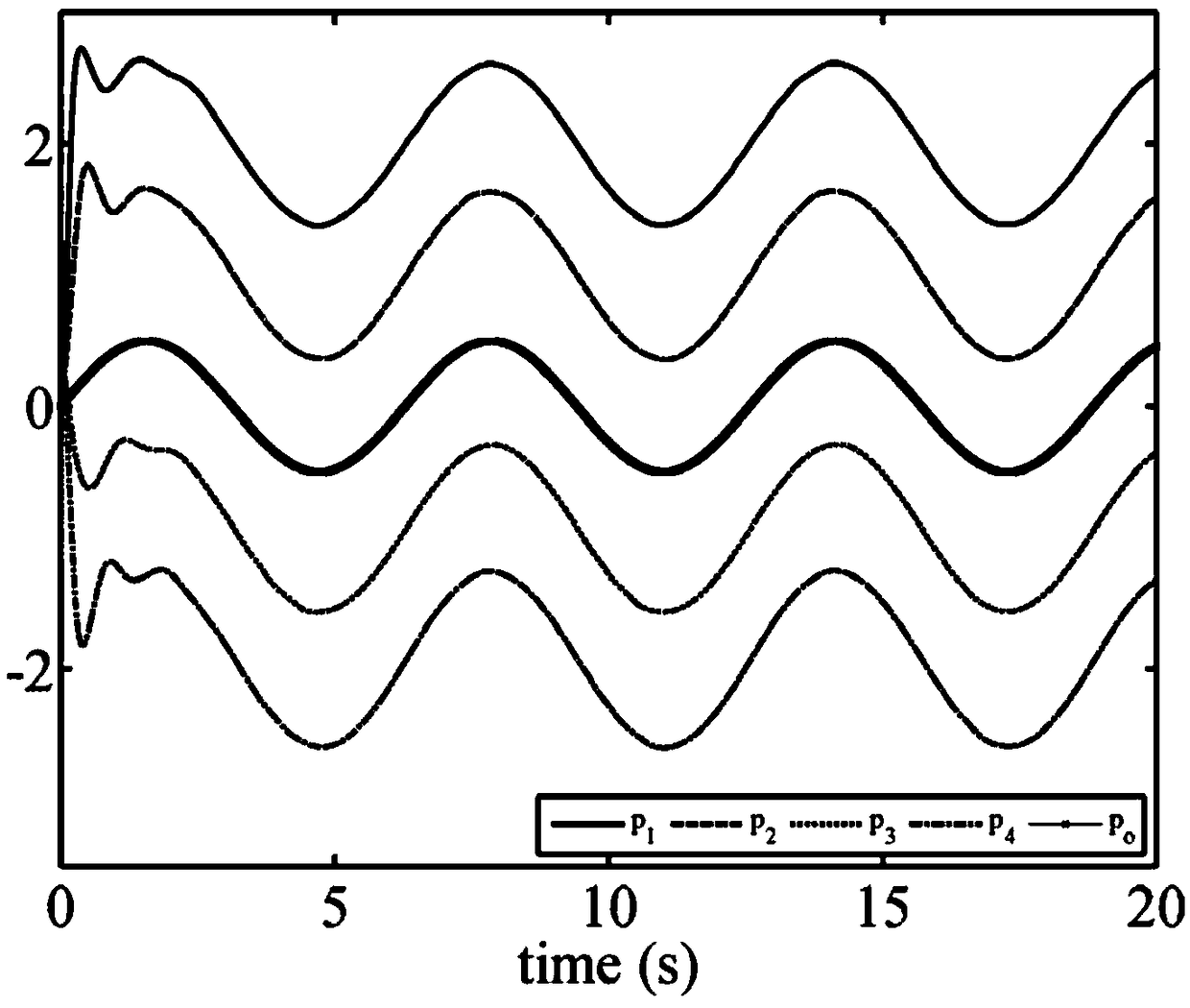
[0050] See Figure 1 to Figure 8 , figure 1 A schematic structural diagram of a multi-agent event-driven formation control system provided by the present invention; figure 2 A schematic diagram of the principle of a multi-agent event-driven formation control method provided by the present invention; image 3 Schematic diagram of formation control trajectory provided by the present invention; Figure 4 Schematic diagram of formation driving deviation provided for the present invention; Figure 5 to Figure 8 The frequency schematic diagrams of the adjusted preset formations of the follower 1 to the follower 4 provided by the present invention respectively. An embodiment of the present invention provides a multi-agent event-driven formation control system, which specifically includes: a leader and multiple followers; wherein,
[0051] Communication between the leader and at least one of the followers is used to generate a first follow instruction according to the first actio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More