

Dynamic path planning method under vehicle networking condition
A technology of dynamic routing and Internet of Vehicles, which is applied in the field of vehicle intelligent driving and active safety. It can solve the problems that the lane-changing model machinery and artificial potential energy field method cannot solve the local minimum point and cannot satisfy the lane-changing scene, etc., and achieve the goal of preventing collisions. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0057] The specific embodiments of the present invention will be described in conjunction with the accompanying drawings, so that future researchers can better understand the present invention.
[0058] Implementation process of the present invention
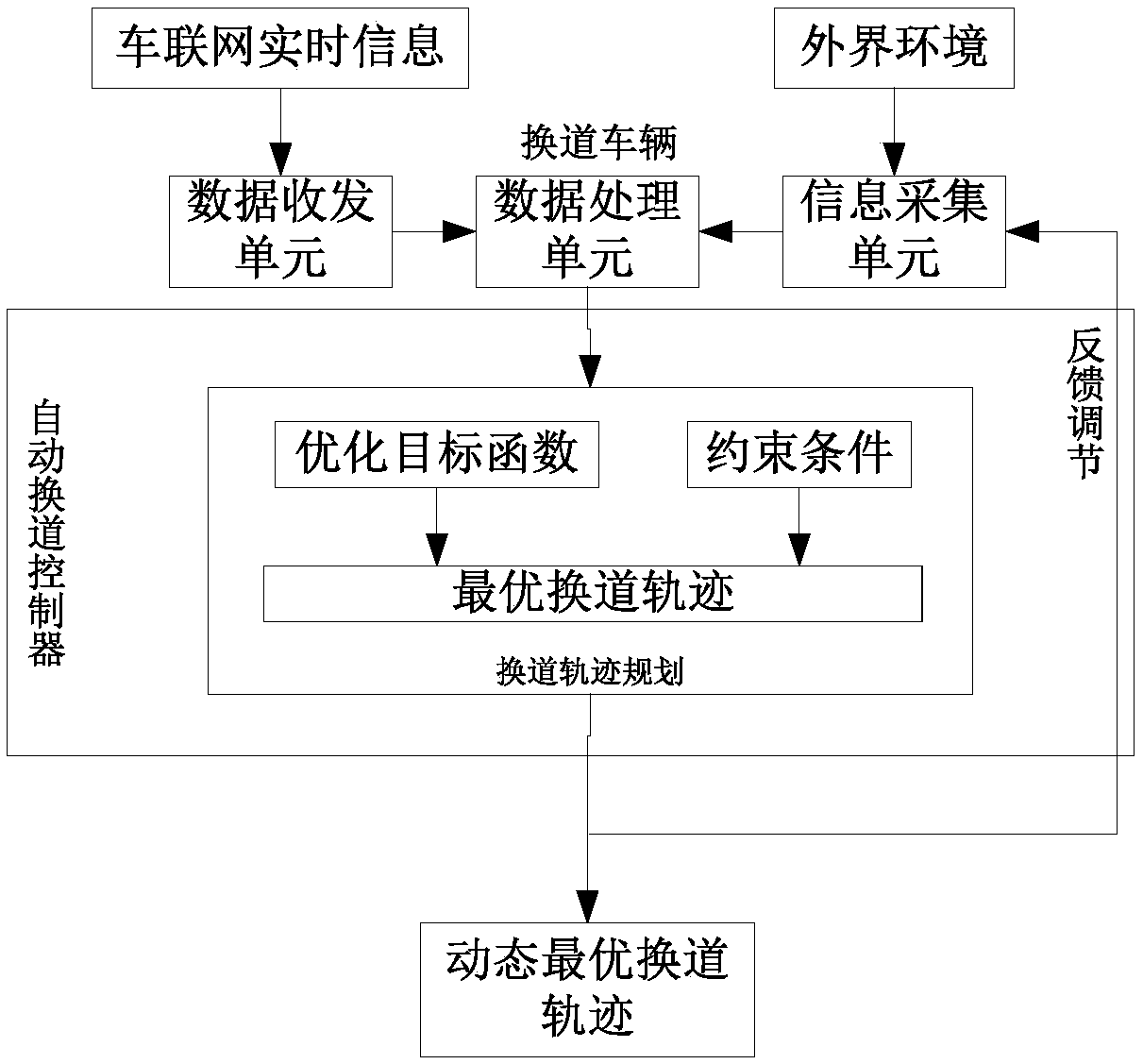
[0059] The present invention is based on a dynamic path planning method under the condition of the Internet of Vehicles. The intelligent vehicle of the Internet of Vehicles uses the Internet of Vehicles and sensors to sense the driving environment. The sensors include GPS, millimeter wave radar, camera and laser radar to obtain the surrounding environment information of the vehicle. These raw data Fusion is carried out in the "sensor data fusion module", and at the same time, the vehicle networking transceiver unit receives the real-time information of the vehicle network to obtain dynamic and static obstacle information. According to the real-time information, the automatic lane change controller selects different constraints a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More