Resection Dynamic Pose Measurement System and Method Based on Inertial Measurement Unit
An inertial measurement unit and pose measurement technology, applied in photogrammetry/video surveying, measurement devices, mapping and navigation, etc., can solve the problem that the recognition and matching of feature points cannot be realized, the accuracy of pose solution is affected, and the drift error increases. and other problems to achieve the effect of improving flexibility and scalability, eliminating slow measurement speed, and improving positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0019] The present invention will be further described below in conjunction with the accompanying drawings.
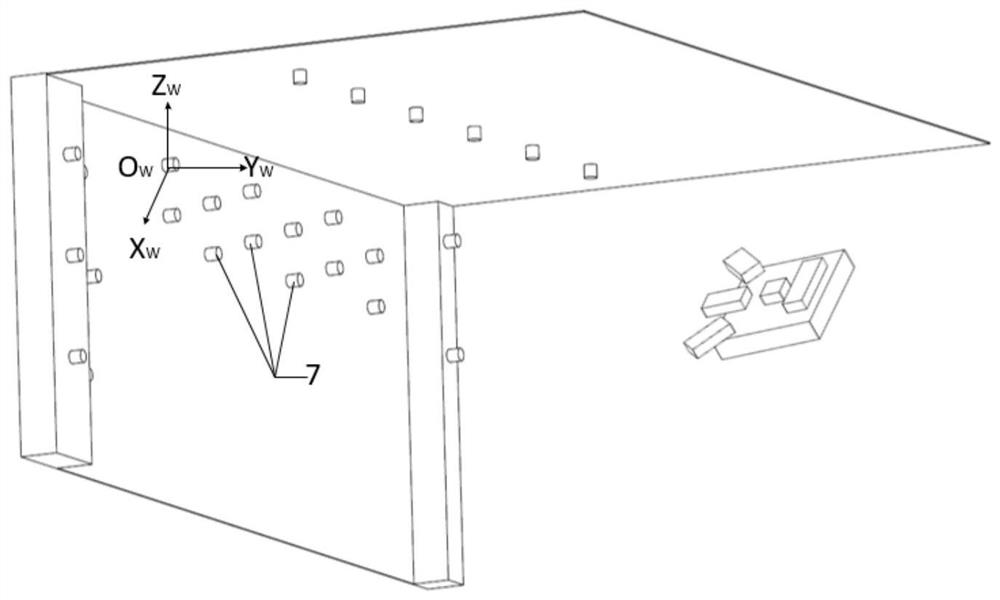
[0020] In order to obtain the spatial position and attitude of the measurement device in real time, and realize the tracking and positioning of the staff in a complex environment, especially in a local limited space, the present invention proposes a resection dynamic pose measurement device and method based on an inertial measurement unit, using Multiple cameras are used as the image acquisition unit, and the high-precision pose information of the IMU is used as compensation in a short period of time to solve the problem of difficult image matching under the fast motion state of the camera. The method is detailed in the following steps:
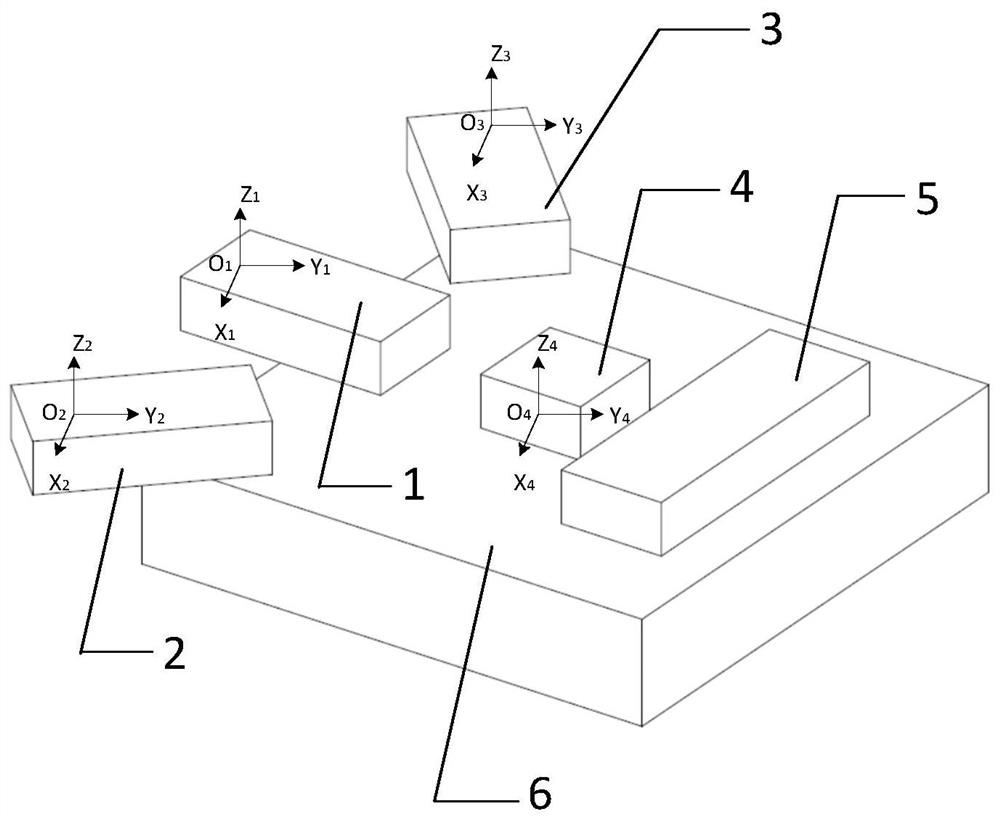
[0021] (1) Build a dynamic pose measurement system, the basic structure of which is as follows: figure 1 As shown, at least two cameras are installed on a rigid workpiece 6. In this example, three cameras are taken as an example, came...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More