An illumination estimation method based on monocular camera
A technology for monocular camera and illumination estimation, applied in the fields of computer graphics and artificial intelligence, can solve the problems of inability to estimate light source information, limitations, and inapplicability of only monocular cameras, etc., to avoid insufficient precision and improve effectiveness Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment
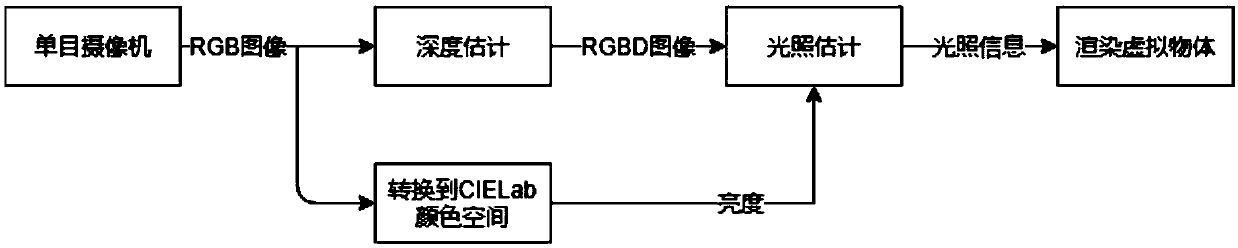
[0020] In this embodiment, the overall flow of the illumination estimation method based on the monocular camera is as follows figure 1 shown, including the following steps:
[0021] In the first step, the monocular camera collects RGB images as input for depth estimation;
[0022] The second step is to construct a convolutional neural network for monocular camera depth estimation, and use the public data set to train the convolutional neural network; input the RGB image to the convolutional neural network whose parameters have been trained for depth estimation, and obtain the depth Prediction value, output depth prediction map;
[0023] In the depth estimation process of this step, first construct a convolutional neural network to predict the depth information in the monocular RGB image, and the training data is from the KITTI public data set, which is a collection of RGB images with depth annotations. After the training is completed, an RGB image is input, and an RGBD image...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More