

Non-coupling two-rotation parallel mechanism
A non-coupling, parallel technology, used in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as strong coupling and difficult control, and achieve the effect of solving poor decoupling, reducing mutual influence, and good kinematics characteristics
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] The technical solutions of the present invention will be further described through specific implementation methods below in conjunction with the accompanying drawings.
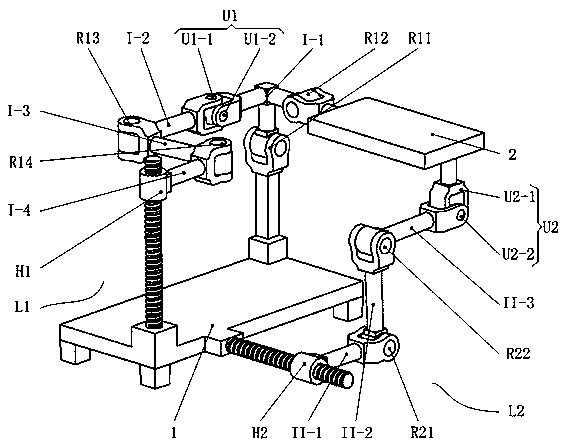
[0015] As shown in the figure, a non-coupling two-rotation parallel mechanism is composed of a fixed platform 1, a moving platform 2, and a first branch kinematic chain L1 and a second branch kinematic chain L2 connecting the two platforms.
[0016] The first branch kinematic chain L1 is a mixed chain, which is composed of a space closed-loop structure and a second revolving pair R12 connected in series. The space closed-loop structure also includes two sub-branches. The second sub-branch of the revolving pair R11 is a single open chain composed of a first helical pair H1, a third revolving pair R13, a fourth revolving pair R14 and a first universal hinge U1. Among them, the first rotating pair R11, the second rotating pair R12 and one end of the first universal hinge U1 are connected with the three bra...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More