

Binocular vision-based express parcel grabbing device and grabbing method
A technology of binocular vision and grasping device, applied in the direction of photographing device, photo interpretation, sorting, etc., can solve the problem of unpredictable position and posture of the workpiece, and achieve the goal of improving the level of intelligence, ensuring operation accuracy and saving working space. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] Through the following description of the embodiments, it will be more helpful for the public to understand the present invention, but the specific embodiments given by the applicant cannot and should not be regarded as limitations on the technical solutions of the present invention, any components or technical features Changes to the definition and / or formal but not substantive changes to the overall structure should be regarded as the scope of protection defined by the technical solutions of the present invention.
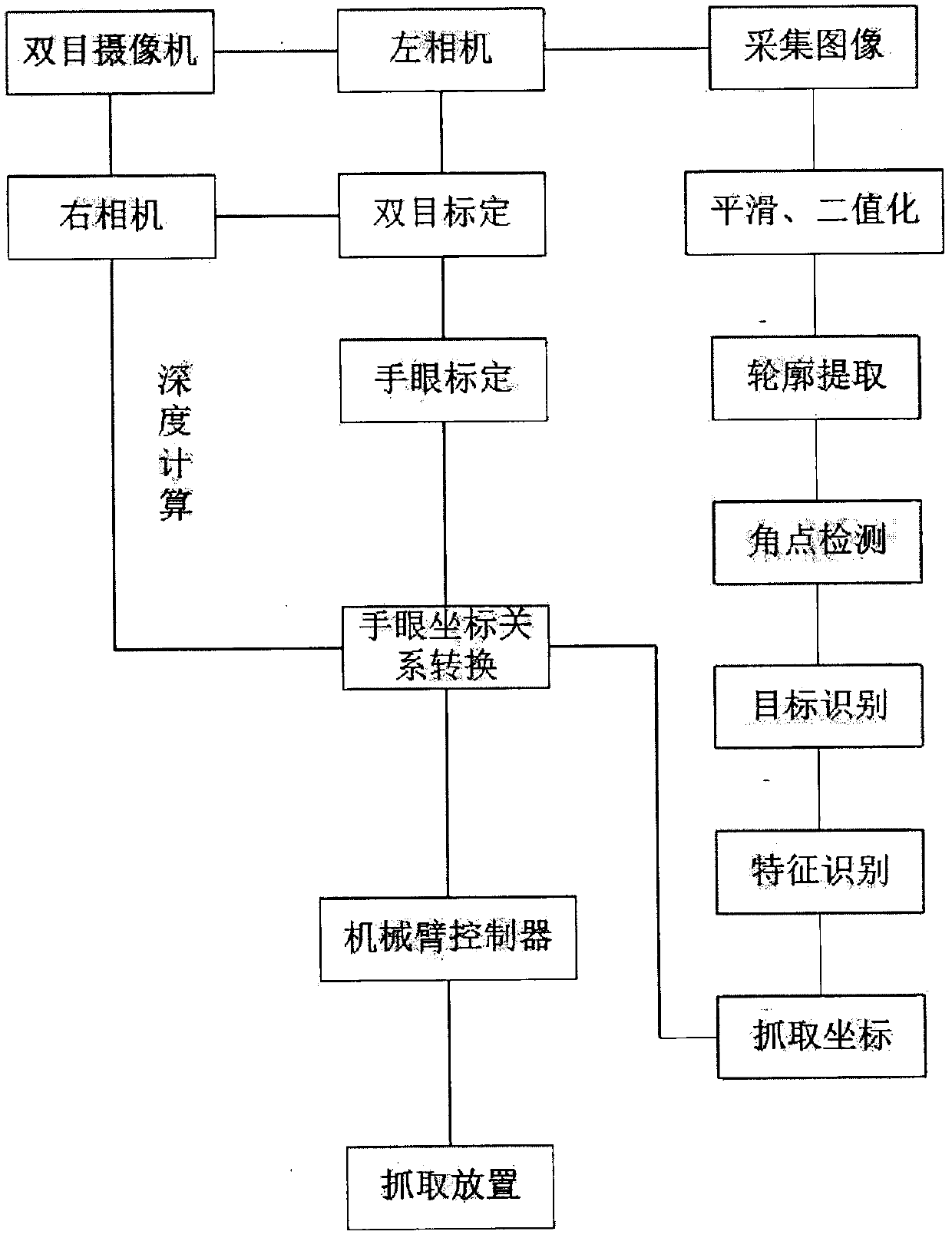
[0029] A binocular vision-based express package grabbing method, the method includes the following steps: 1) establish a coordinate system: calibrate the binocular camera, establish a camera coordinate system, a world coordinate system and a mechanical arm coordinate system, and define each coordinate 2) Image preprocessing: perform preprocessing on the image including binarization and contour extraction; 3) Corner detection: use the harris operator to perfo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More