

Multi-unmanned boat collaborative path planning method
A technology for path planning and unmanned boats, which is applied in the directions of measuring devices, instruments, surveying and navigation, etc., and can solve the problems of limited sensors and equipment, mutual collision, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0057] In order to facilitate the understanding of those skilled in the art, the present invention will be further described below in conjunction with the accompanying drawings.
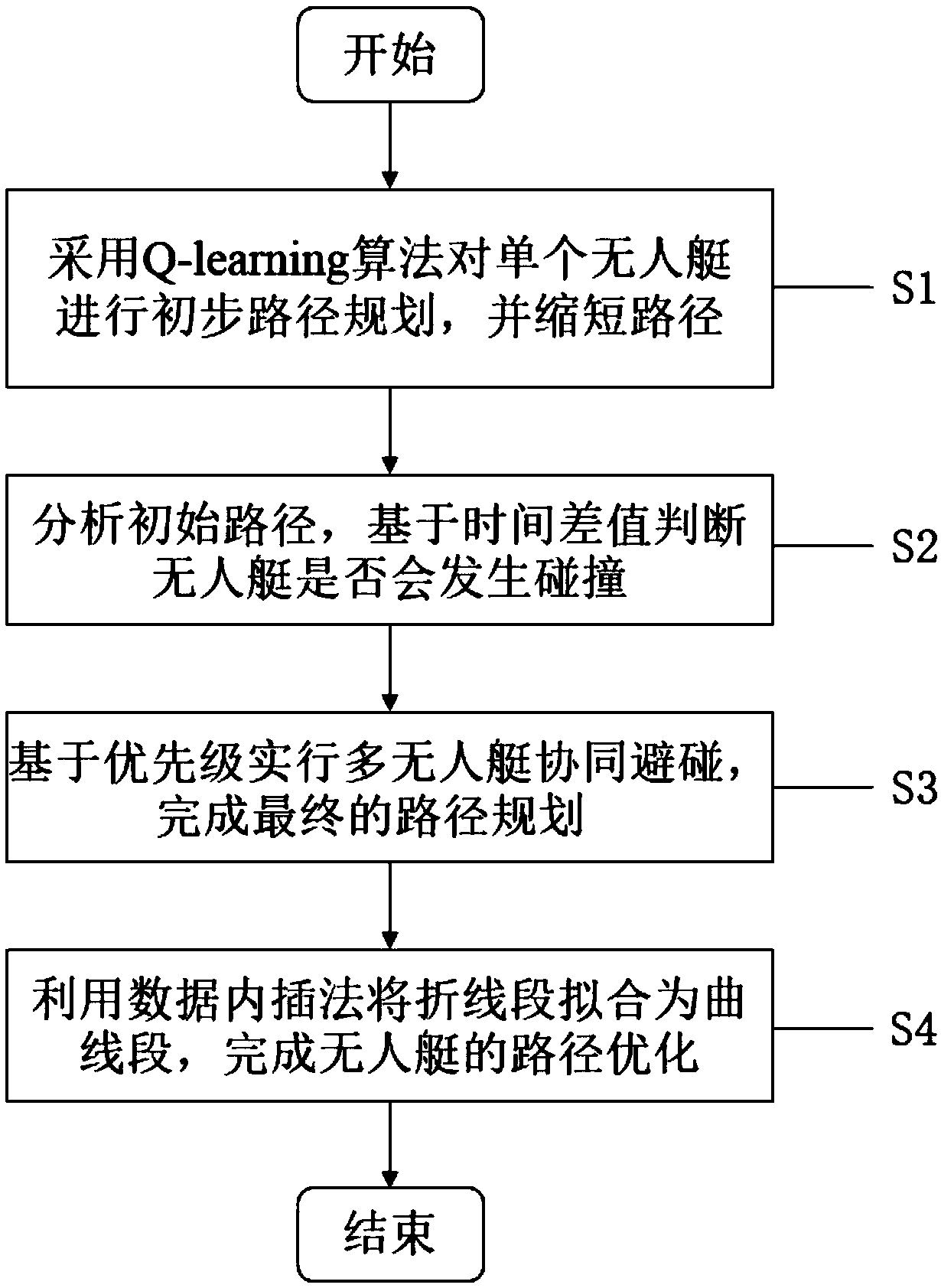
[0058] as attached figure 1 As shown, the present invention discloses a multi-unmanned vehicle cooperative path planning method, comprising the following steps:
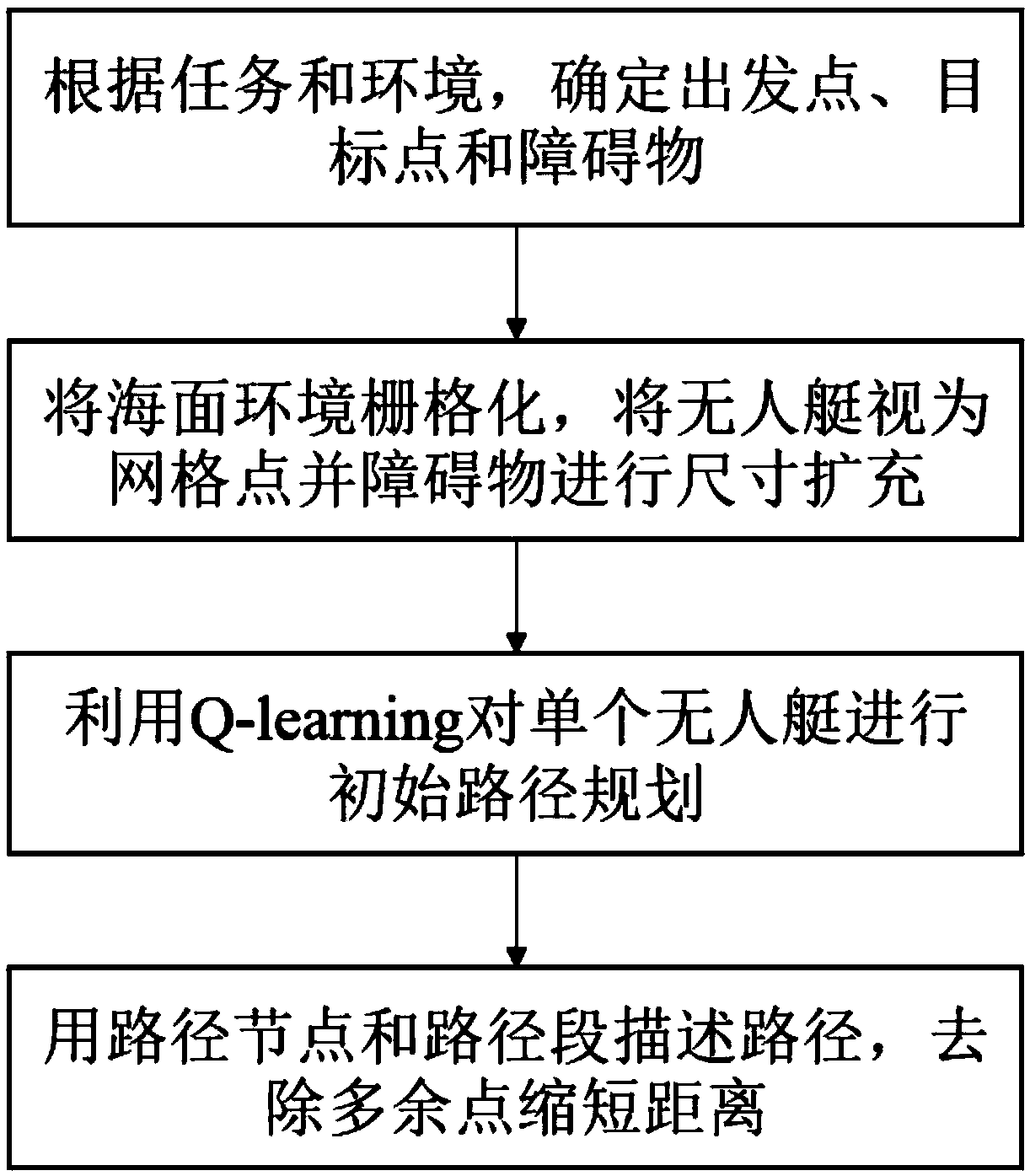
[0059] S1, according to the mission requirements and the navigation environment, the Q-learning algorithm is used to perform preliminary path planning for a single unmanned vessel, and the path is shortened. Due to the large sea area, in order to reduce the amount of calculation, the direction selection of the initial path planning of the unmanned vehicle is only 4 directions, and the path is shortened by deleting the intermediate point after the initial path is obtained;
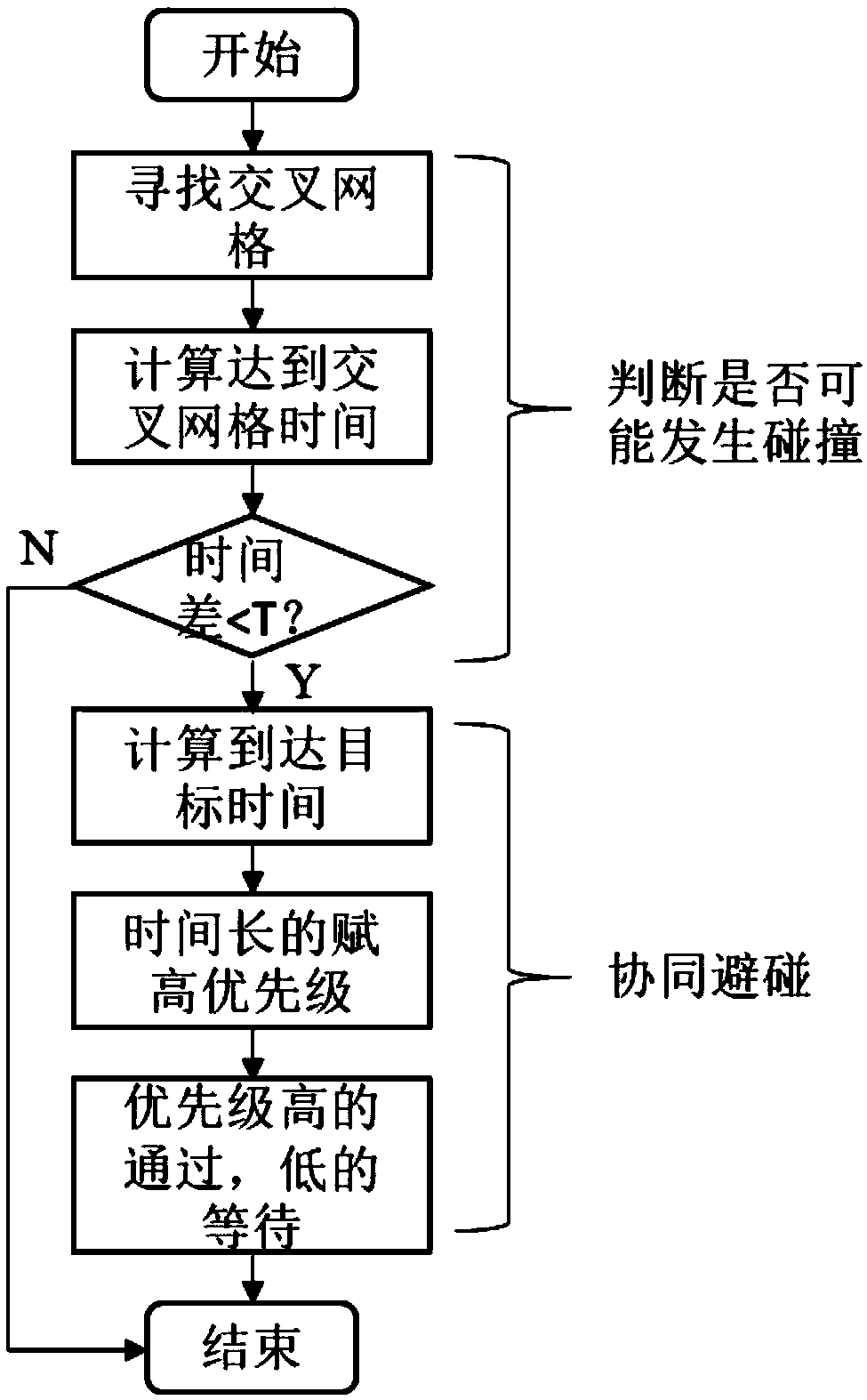
[0060] S2, analyze the initial path of each unmanned boat, put the grid map in the coordinate system, use points to describe the unmanned boat, use line segments to des...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More