

A Semantic Slam Object Association Method Based on Hierarchical Topic Model
A technology of hierarchical themes and objects, applied in character and pattern recognition, image analysis, image enhancement, etc., can solve unreliable problems, achieve accurate object association, and promote the effect of camera pose estimation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The present invention will be further described below in conjunction with the accompanying drawings.
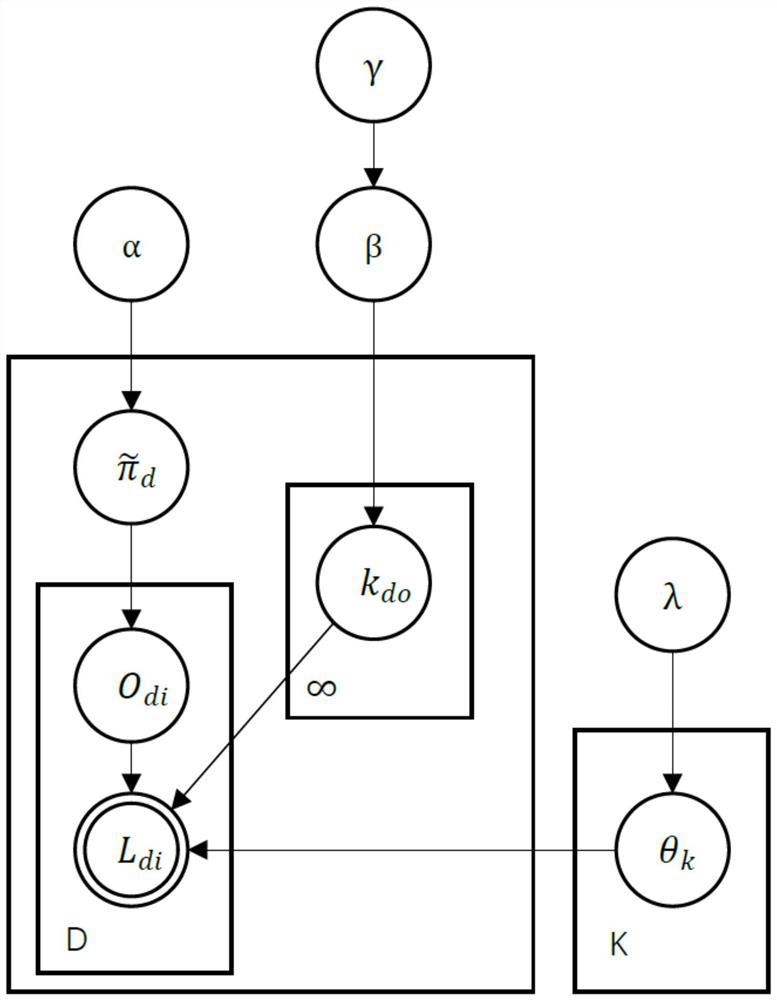
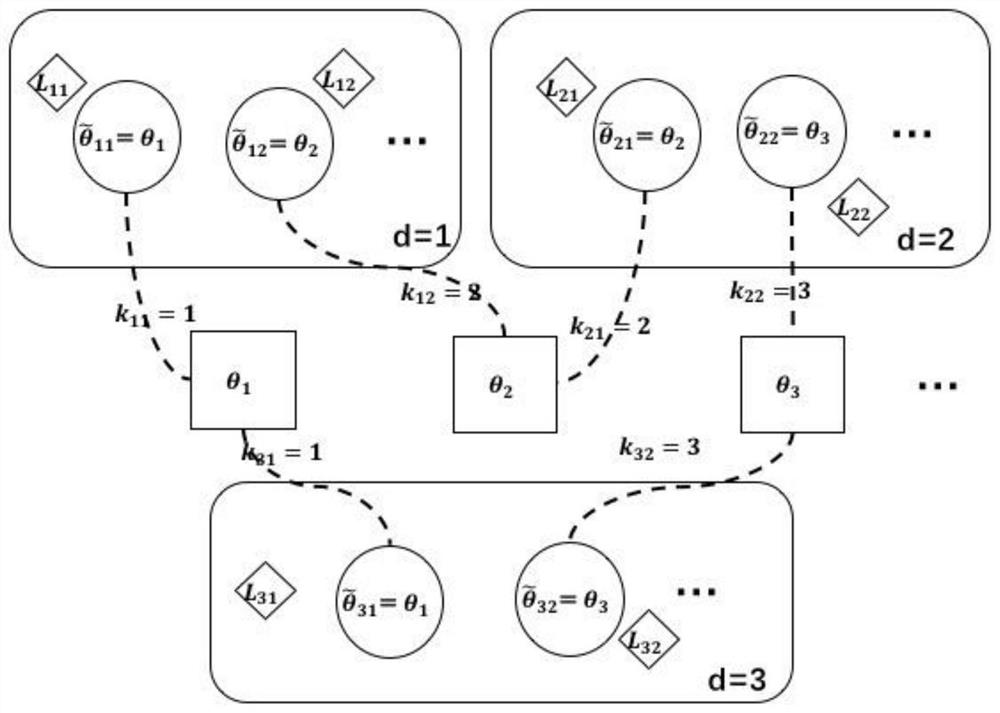
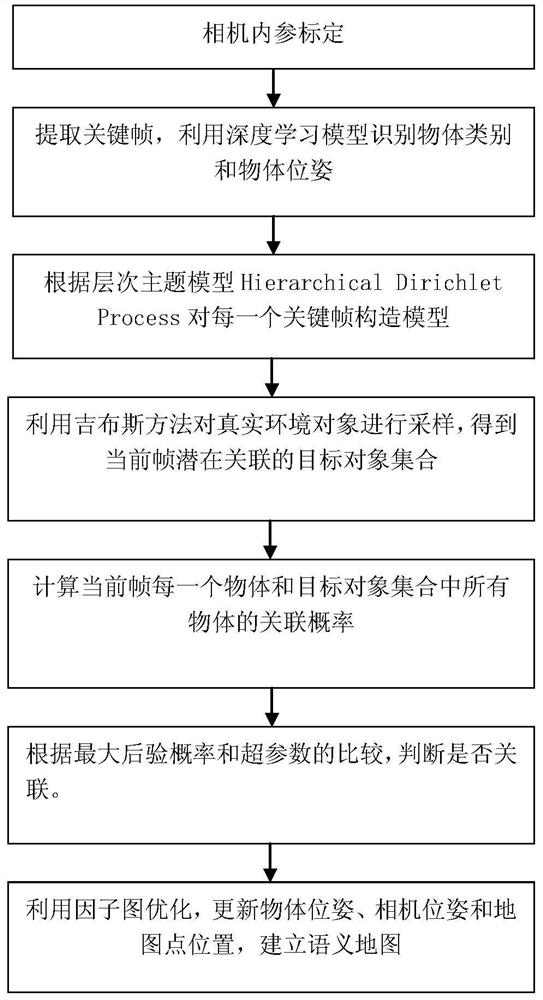
[0031] refer to Figure 1 ~ Figure 3 , a semantic SLAM object association method based on a hierarchical topic model, comprising the following steps:
[0032] 1) Perform internal reference calibration on the camera to obtain the camera's distortion parameters and internal reference matrix
[0033]
[0034] Among them, [x, y] are the coordinates of the normalized plane point, [x distorted ,y distorted ] is the distorted coordinate, k 1 , k 2 , k 3 ,p 1 ,p 2 is the distortion term;
[0035]
[0036] P is the internal reference matrix of the camera, where f is the focal length of the camera, [O x , O y ] is the main optical axis point;
[0037] 2) Use Single Shot MultiBox Detector (SSD) and Convolutional NeuralNetwork (CNN) to build a deep learning network, train a deep learning model, and complete object recognition and object pose prediction tasks;
[...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More