

A multi-UAV (Unmanned Aerial Vehicle) collaborative map construction method oriented to data sharing
A multi-UAV and map construction technology, which is applied in image data processing, image enhancement, image analysis, etc., can solve the problems of long time-consuming map fusion process and slow return to optimized maps, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
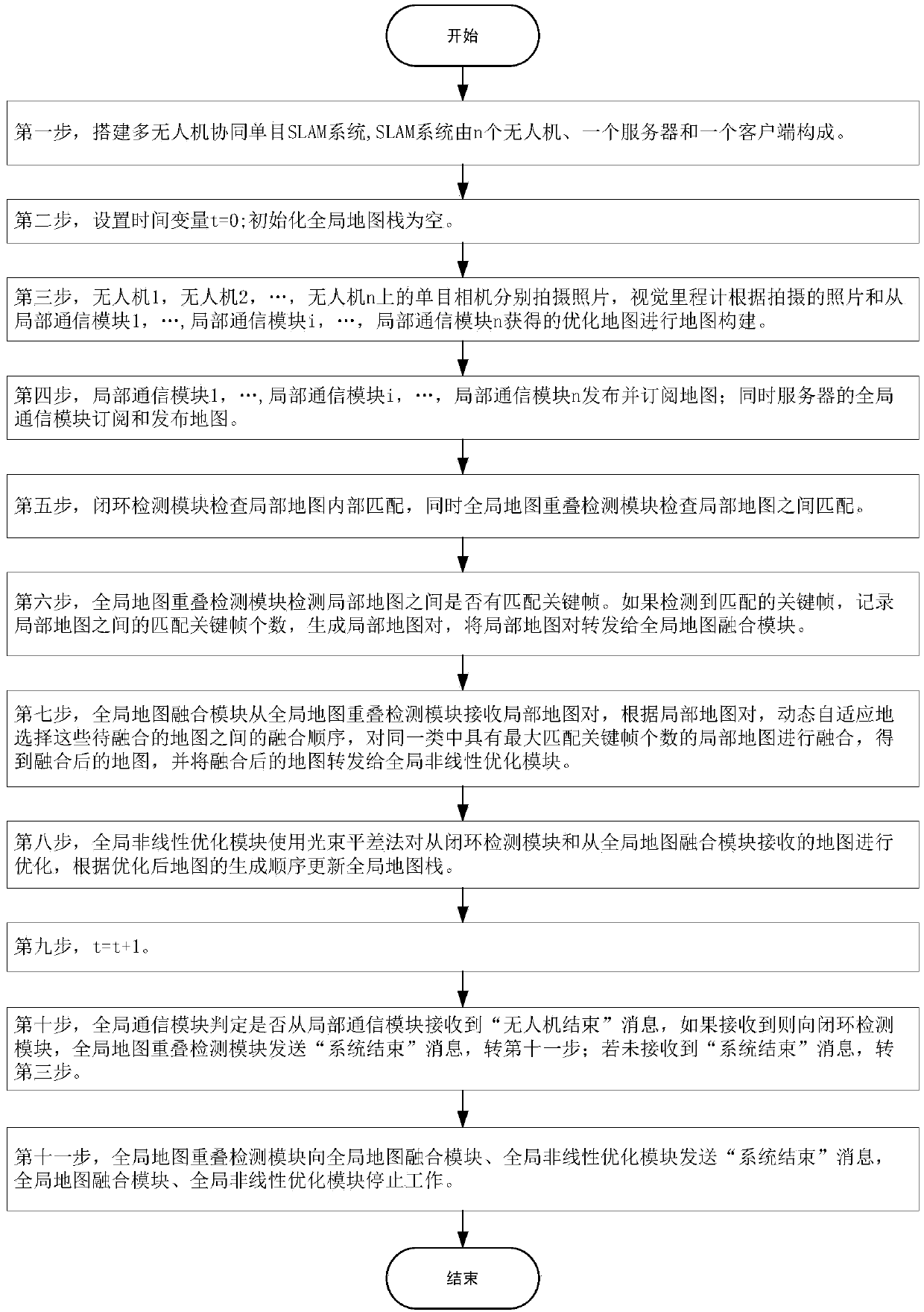
[0116] Such as figure 2 Shown, the present invention comprises the following steps:
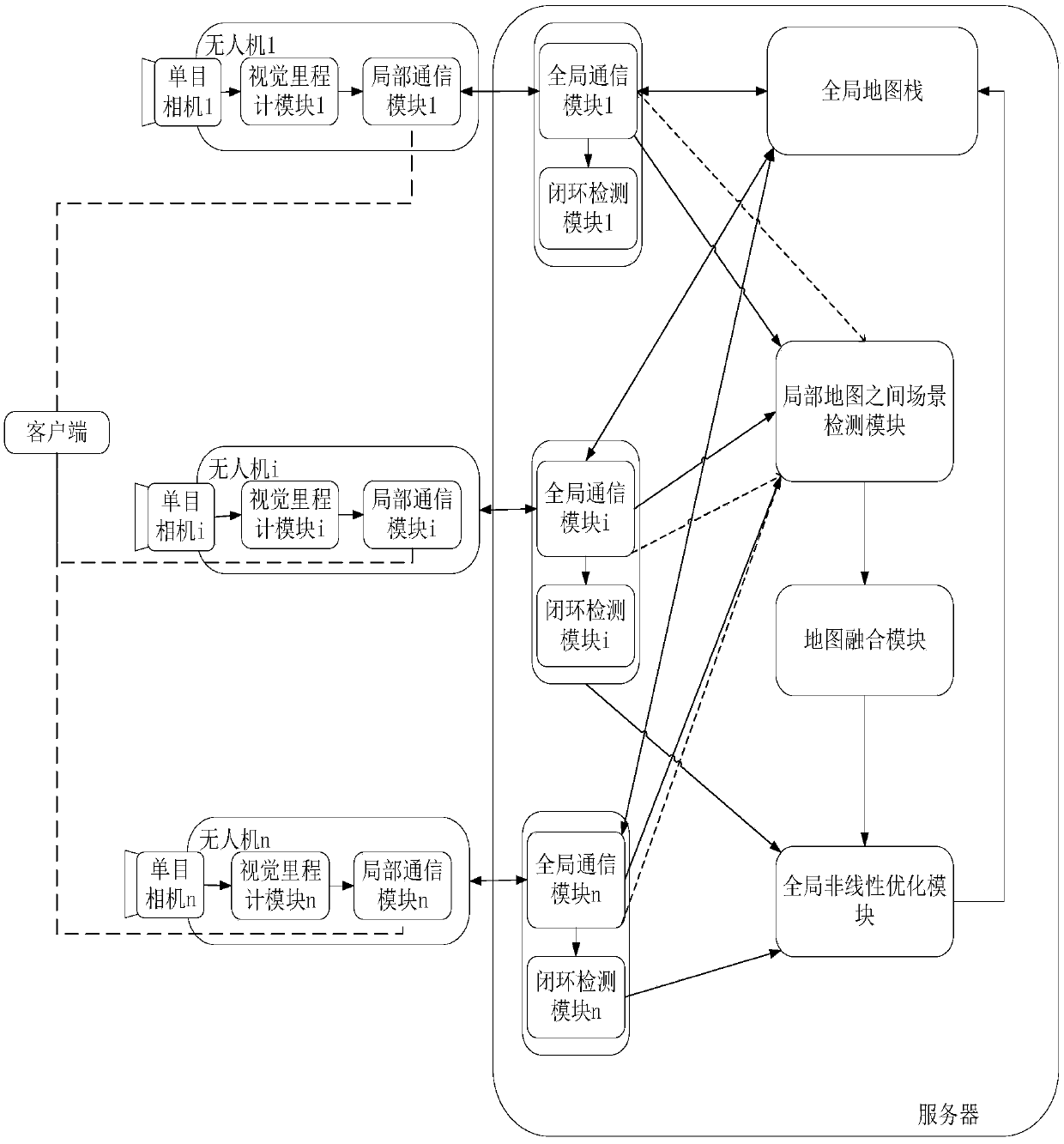
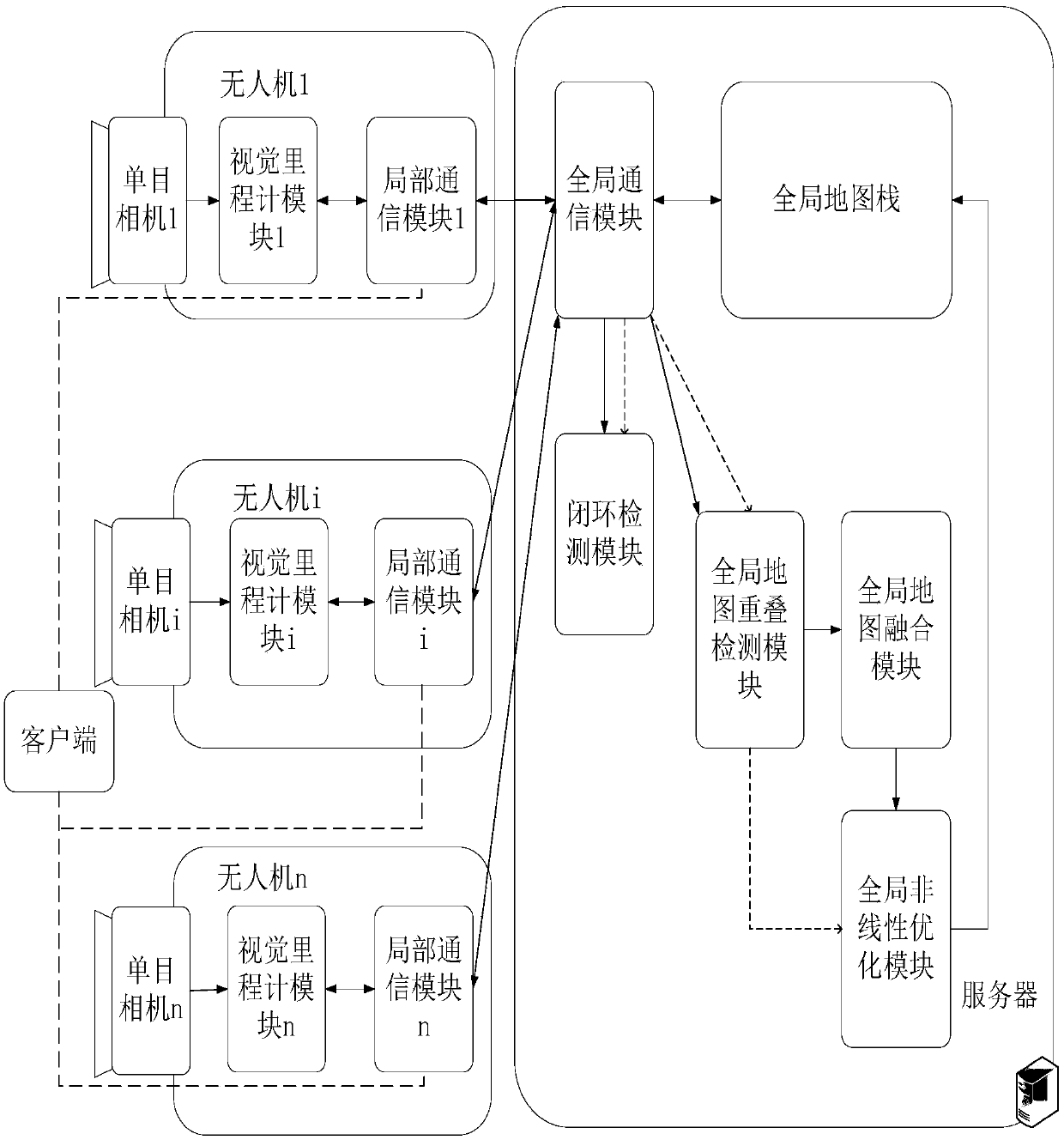
[0117] The first step is to build a multi-UAV cooperative monocular SLAM system. Such as image 3 As shown, the multi-UAV cooperative monocular SLAM system consists of n UAVs, a server and a client. A computer that can run software programs is installed on the drone; the server is a computing device that has abundant storage resources, can provide external services, and can run computing-intensive applications; the client is a resource-controllable computing device with good computing power. Software that controls the operation of n drones is installed on it. The client is connected to n drones (represented as drone 1, ..., drone i, ..., drone n, 1≤i≤n) through a wireless network, and the server is also connected to n drones through a wireless network. Man-machine connection.
[0118] The client controls the start and stop of UAV 1, ..., UAV i, ..., UAV n map construction by sending "Dr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More