

High precision trajectory tracking and control method
A trajectory tracking and control method technology, applied in vehicle position/route/altitude control, non-electric variable control, control/regulation system, etc., can solve the problems of lack of technical support and application, lack of high-precision trajectory tracking, etc. The effect of precision tracking
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments, and the implementation scope of the present invention is not limited thereto.
[0037] like Figure 1 to Figure 3 As shown, a high-precision trajectory tracking control method described in this embodiment.
[0038] In order to achieve the above object, the specific scheme of the present invention is as follows: comprise the following steps,
[0039] a1. Determine the position information and rudder angle information of the ship;
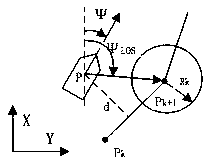
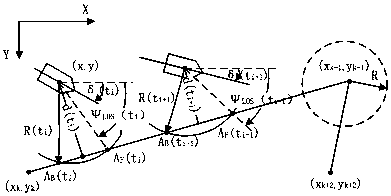
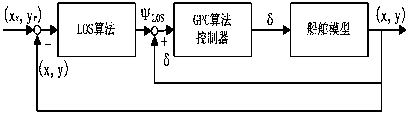
[0040] a2. Assign the position information and rudder angle information to the line-of-sight navigation algorithm, and obtain the desired heading angle through the line-of-sight navigation algorithm;
[0041] a3, including a GPC controller, which is transmitted to the GPC controller through the determined ship position information, rudder angle information and expected heading angle;
[0042] a4. The GPC co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More