

A left and right hand exchange mechanism for a rope-driven upper limb rehabilitation training device
A technology of rope drive and trainer, which is applied in passive exercise equipment, physical therapy, etc., can solve the problems of increased difficulty, complex reversing structure, and low utilization rate of upper limb rehabilitation training mechanical arms, and achieve the effect of improving use efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
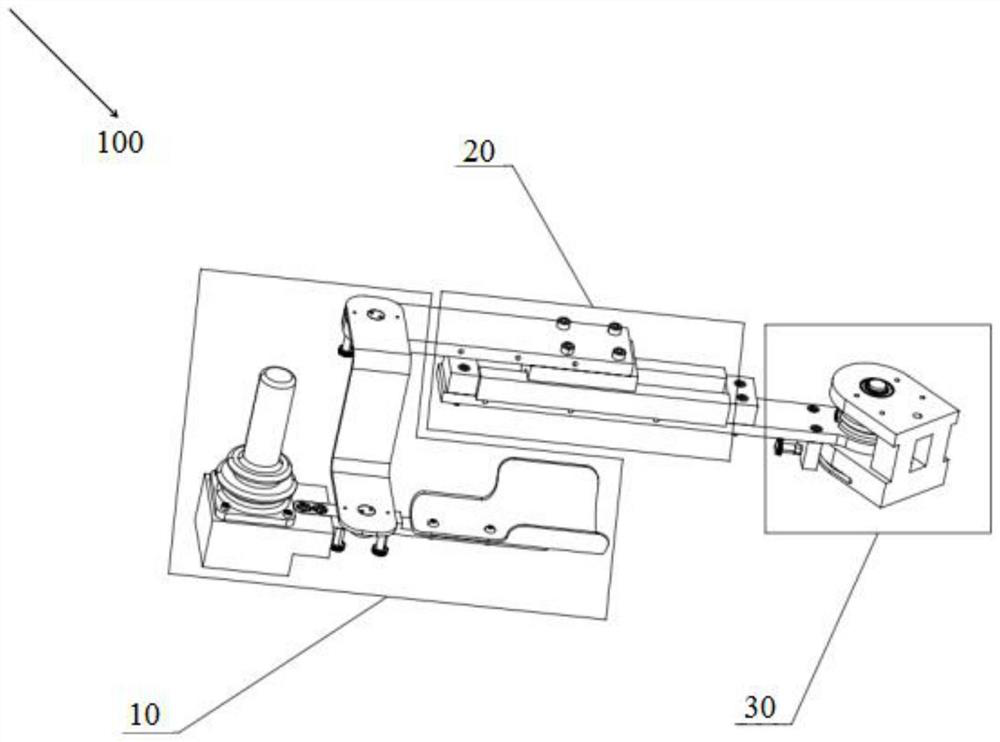
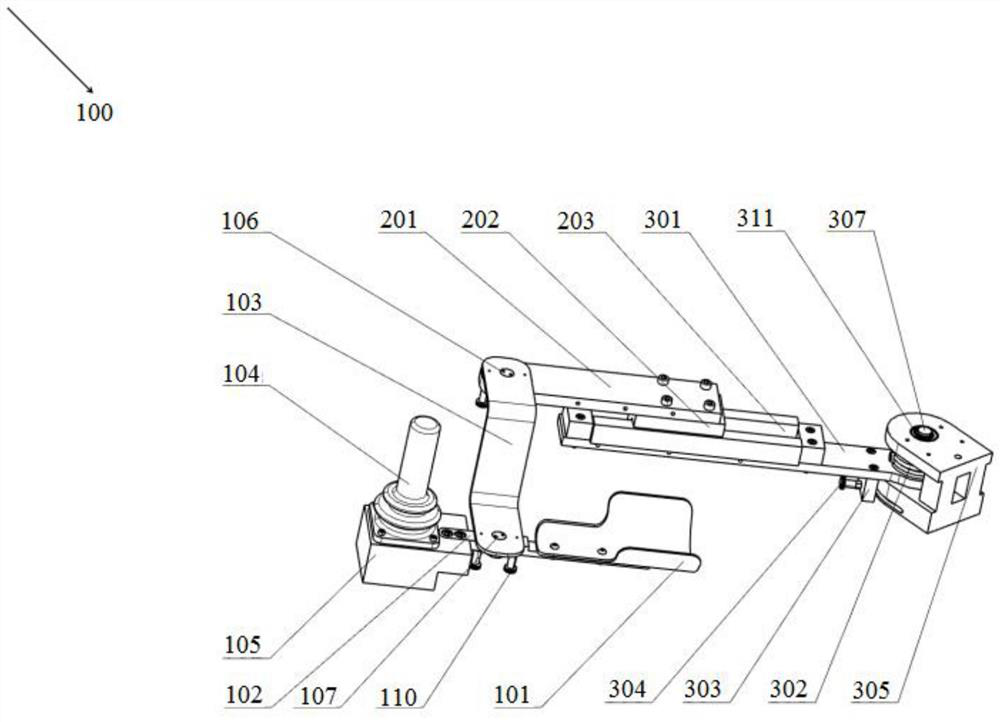
[0022] figure 1 It is a schematic diagram of the overall structure of the left and right hand exchange mechanism for the rope-driven upper limb rehabilitation training device in the embodiment of the present invention, figure 2 It is a structural schematic diagram of the adduction state of the mechanical arm of the left and right hand exchange mechanism for the rope-driven upper limb rehabilitation training device in the embodiment of the present invention
[0023] Such as figure 1 and figure 2 As shown, a left and right hand exchange mechanism 100 for a rope-driven upper limb rehabilitation training device in this embodiment includes: a wrist reversing part 10 , a forearm compensating part 20 and an elbow flexion and extension part 30 .
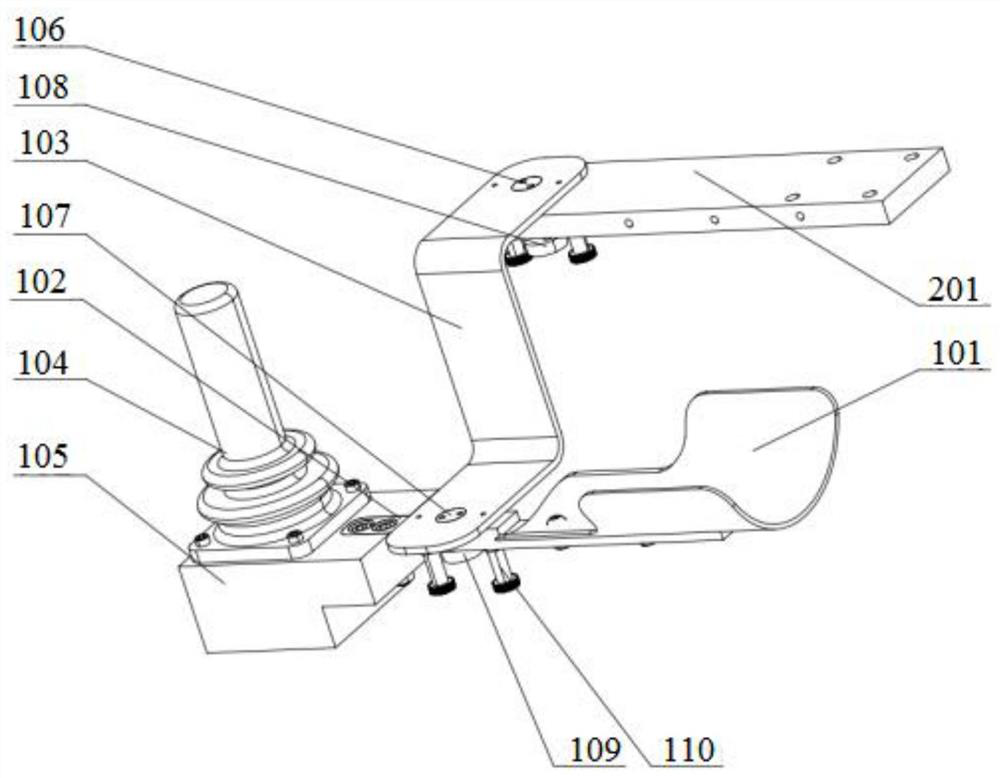
[0024] image 3 It is a structural schematic diagram of the wrist reversing part of the left and right hand exchange mechanism used for the rope-driven upper limb rehabilitation training device in the embodiment of the present invention...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More