

System and method for compensating automobile laser radar obstacle recognition blind area
A lidar and obstacle technology, applied in the field of vehicle obstacle recognition, can solve the problems of large amount of data calculation and more data processing, and achieve the effect of fast processing and transmission, improving safety and responsiveness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
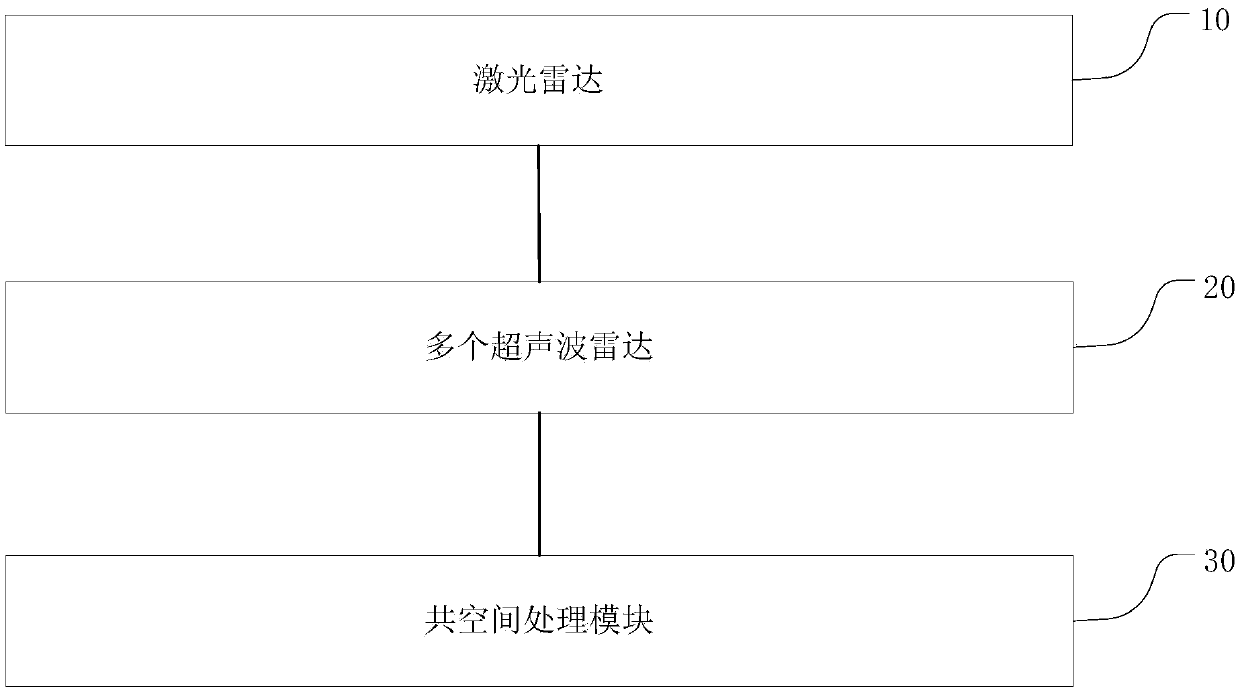
[0050] This embodiment provides a system for compensating the blind area of obstacles recognized by the automotive lidar, such as Figure 1 to Figure 4 As shown, the system includes:
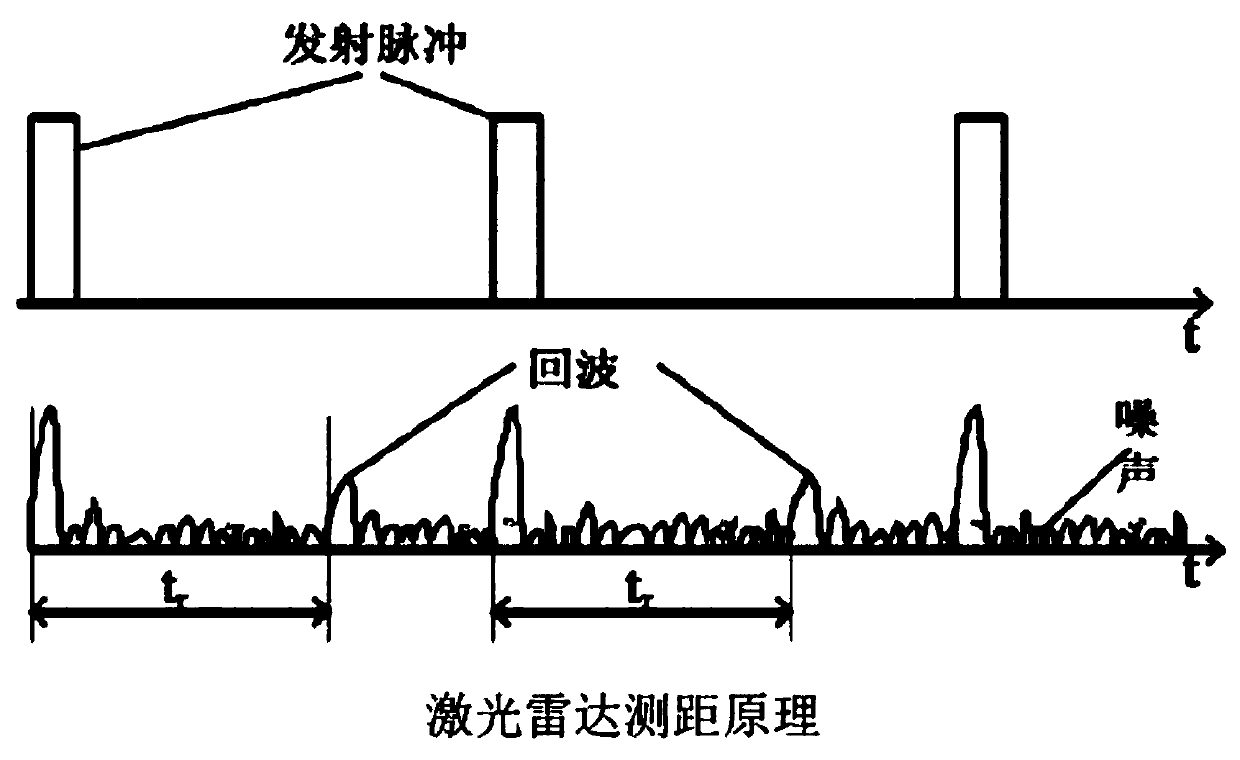
[0051] Lidar, used to obtain preset point cloud data information of obstacles within the preset scanning range;
[0052] Multiple ultrasonic radars are used to obtain preset point data information corresponding to obstacles within the preset sensing range;
[0053] The co-space processing module, according to the preset time clustering processing method, performs preset time clustering processing on the acquired preset point cloud data and preset point data, and obtains the current vehicle preset sensing range and preset scanning range at the same time obstacle information.
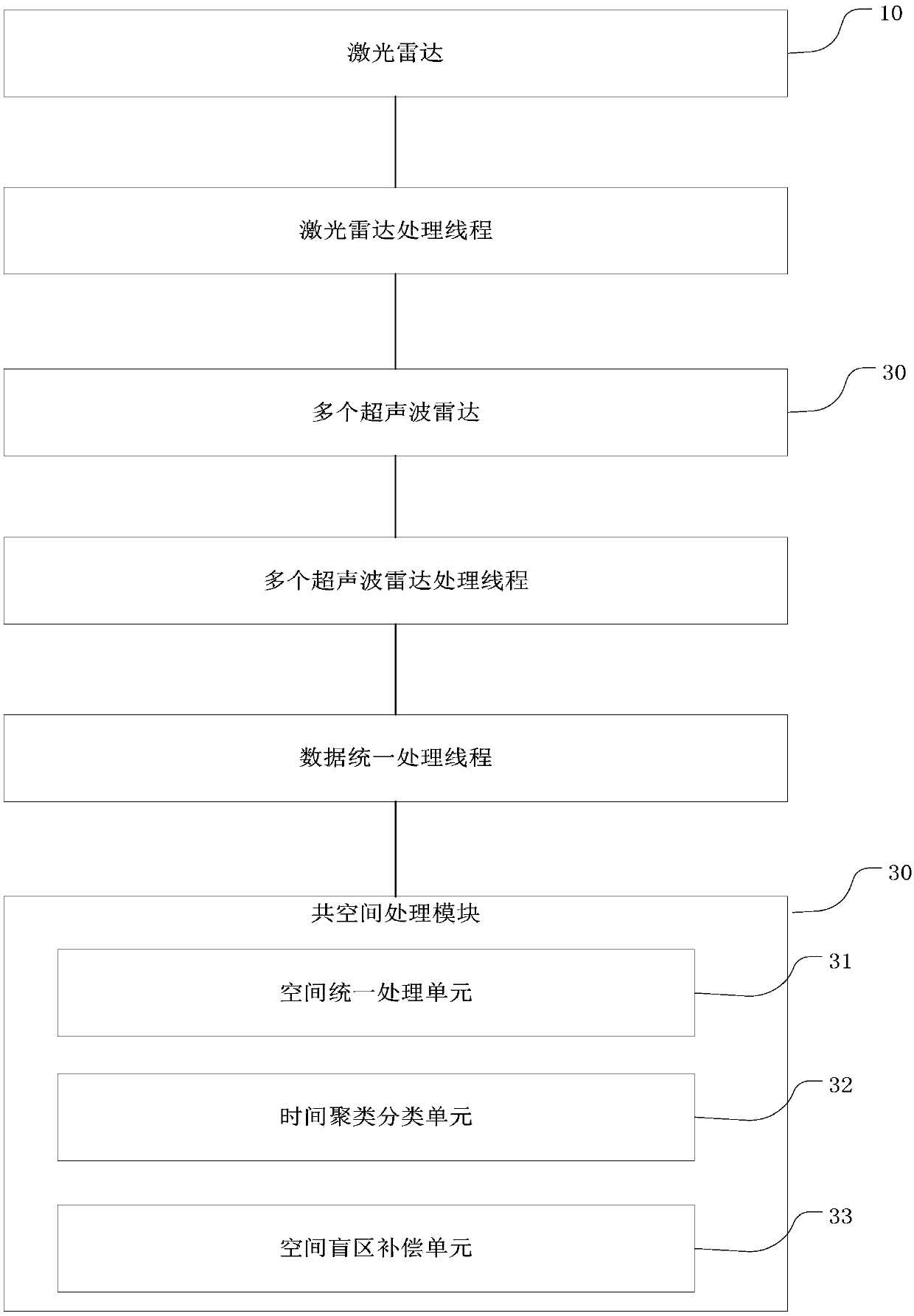
[0054] Further, include:
[0055] The laser radar processing thread is used to transmit the preset point cloud data information obtained by the laser radar;
[0056] Multiple ultrasonic radar processing threads are us...
Embodiment 2
[0073] This embodiment provides a system for detecting ground obstacles based on laser radar, such as Figure 5 to Figure 6 As shown, the method for compensating the blind area of obstacles identified by automotive lidar includes steps:
[0074] S1: Obtain preset point cloud data information of obstacles within the preset scanning range through lidar;
[0075] S2: Obtain preset point data information corresponding to obstacles within the preset sensing range through multiple ultrasonic radars;
[0076] S3: Obtain preset point cloud data information and preset point data information through the data unified data processing thread, and perform preset time clustering on the acquired preset point cloud data and preset point data according to the preset time clustering processing method Processing to obtain obstacle information within the preset sensing range and preset scanning range of the current car at the same time.
[0077] Further, step S2 includes:
[0078] S21: Obtain...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More