

Detecting objects in video data
A technology for video data and objects, which is applied in the field of video processing and can solve the problems of frequent changes in the position and orientation of the shooting device.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
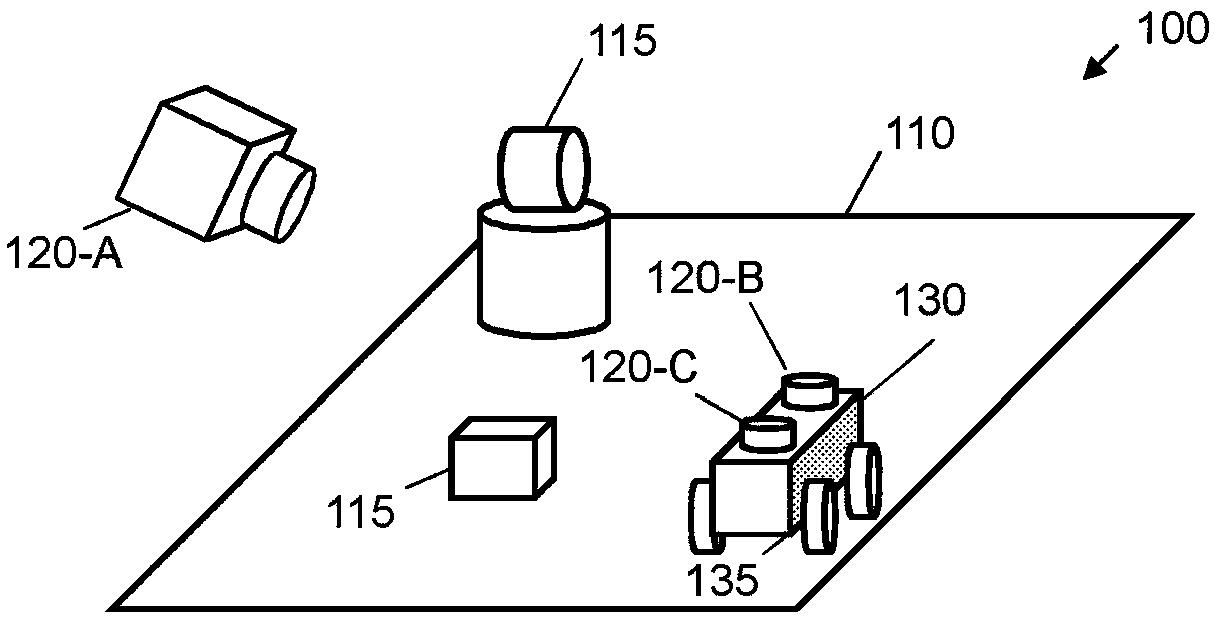
example 100
[0052] Example 100 also illustrates various exemplary capture devices 120 that may be used to capture video data associated with a 3D space. The camera 120 may comprise a camera arranged to record data resulting from viewing the 3D space 110 in digital or analog form. In some cases, the photographing device 120 is movable, for example, can be set to photograph different frames corresponding to different viewing portions of the 3D space 110 . The camera 120 is movable relative to the static mount, for example, may include actuators to change the position and / or orientation of the camera relative to the three-dimensional space 110 . In another case, the camera 120 may be a handheld device operated and moved by a human user.
[0053] exist Figure 1A A plurality of camera devices 120 are also shown coupled to a robotic device 130 arranged to move within the 3D space 110 . Robotic devices 135 may include autonomous aerial and / or land mobile devices. In this example 100 , roboti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More