Filtering optimization method and system for six-push drone accelerator measurement value
A machine accelerator and optimization method technology, which is applied in the direction of navigation through speed/acceleration measurement, can solve problems such as inaccuracy, underwater drone displacement jump, and inaccurate accelerometer measurement data, so as to reduce the occurrence probability and Error, the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
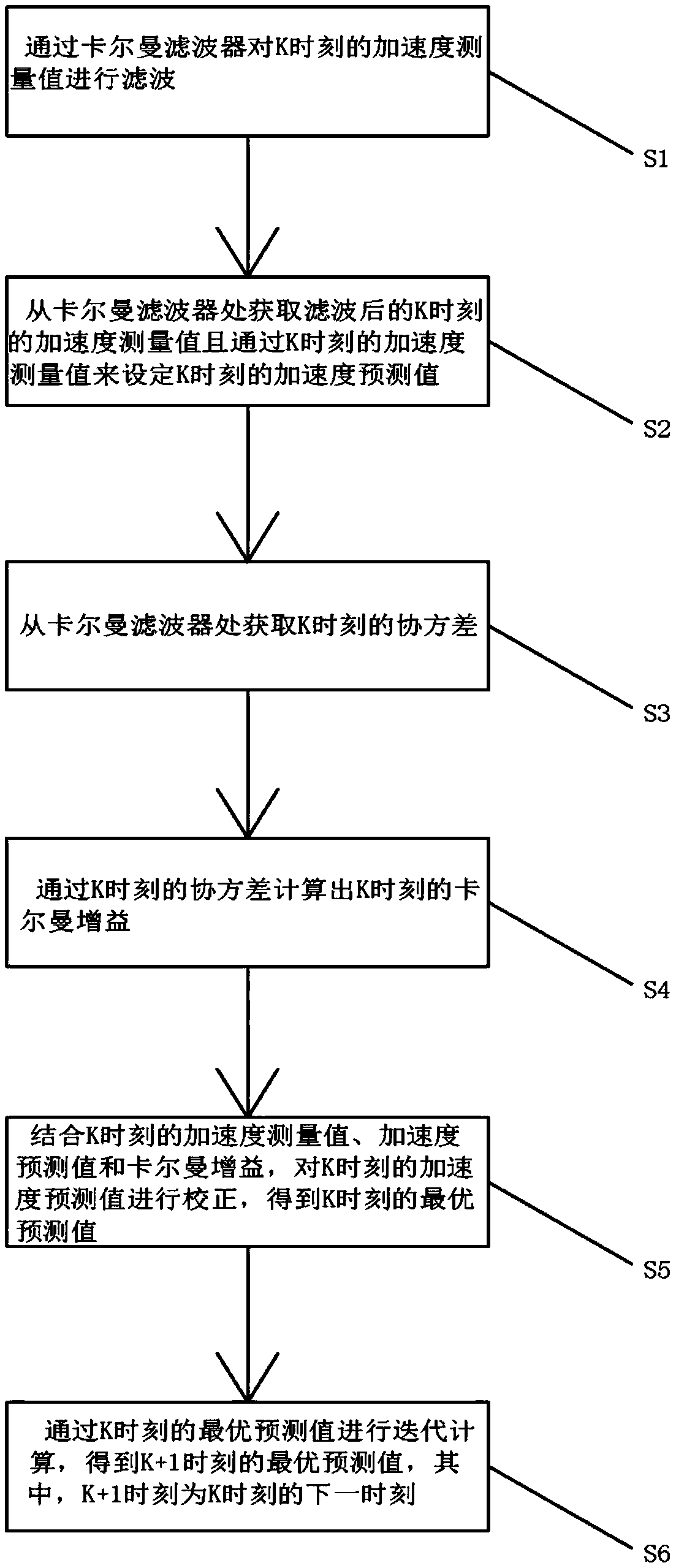
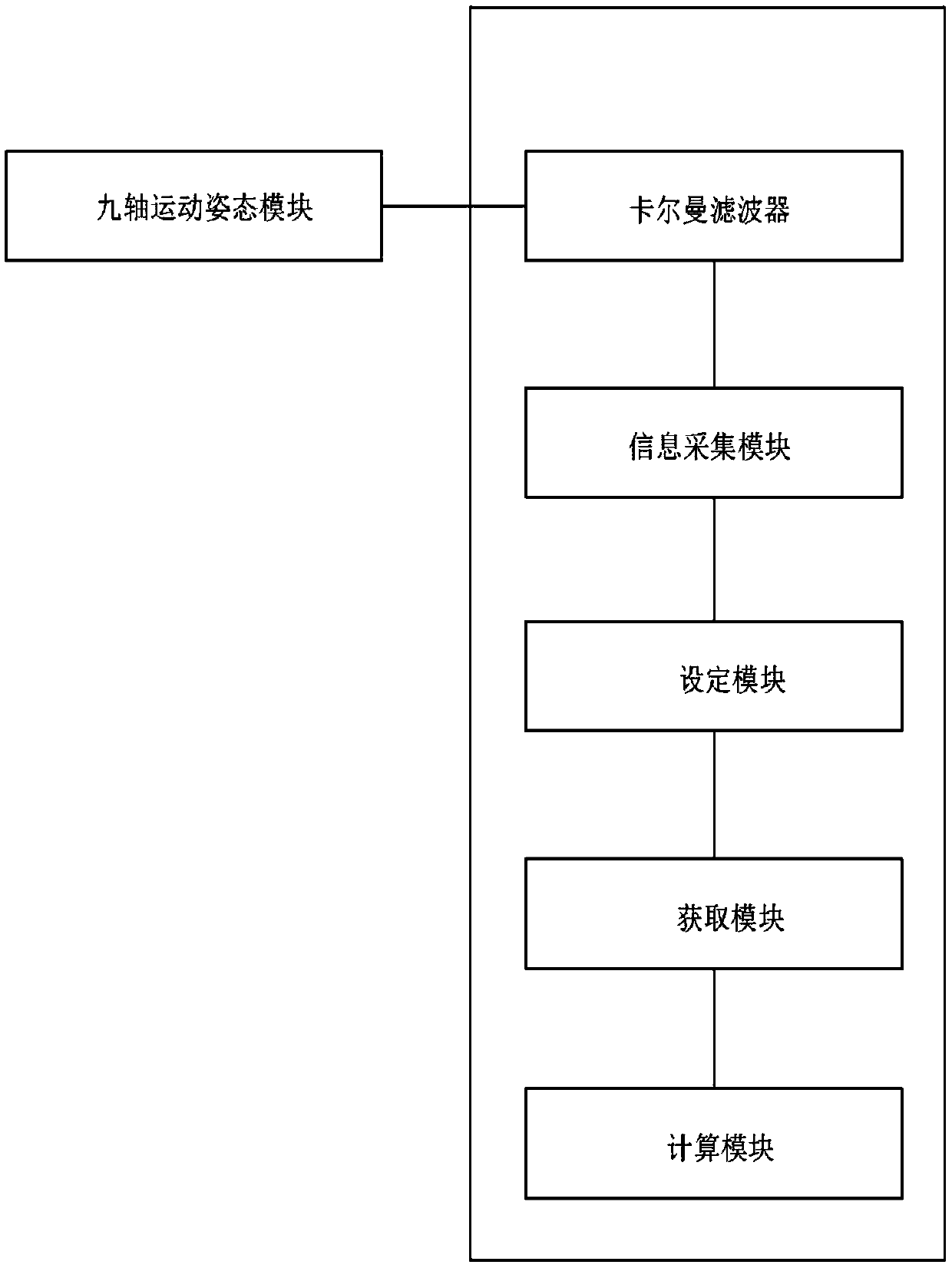
[0030] The six-push UAV is equipped with a Kalman filter and a nine-axis motion attitude module (sensor).
[0031] The nine-axis motion attitude module simulates the inertial navigator for positioning, and the nine-axis motion attitude module is provided with an accelerometer, which can measure the acceleration measurement value through the accelerometer.
[0032] The Kalman filter is an algorithm that uses the linear system state equation to optimally estimate the system state through the input and output observation data of the system. The essence of the Kalman filter is an optimal recursive data processing algorithm (optimal recursive data processing algorithm), which is currently the best and most efficient among various filters for processing signal noise and measurement errors, and is widely used It is used in navigation, communication, control, image processing and sensor data fusion. The core principle of the Kalman filter is to estimate the optimal estimated value by...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



