

Multi-AGV real-time scheduling algorithm based on unidirectional track
A real-time scheduling and orbital technology, applied in control/regulation systems, two-dimensional position/channel control, vehicle position/route/altitude control, etc., can solve problems such as high space complexity, easy deadlock and paralysis, and reduce Possibility of paralysis, increased productivity, easy-to-achieve effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
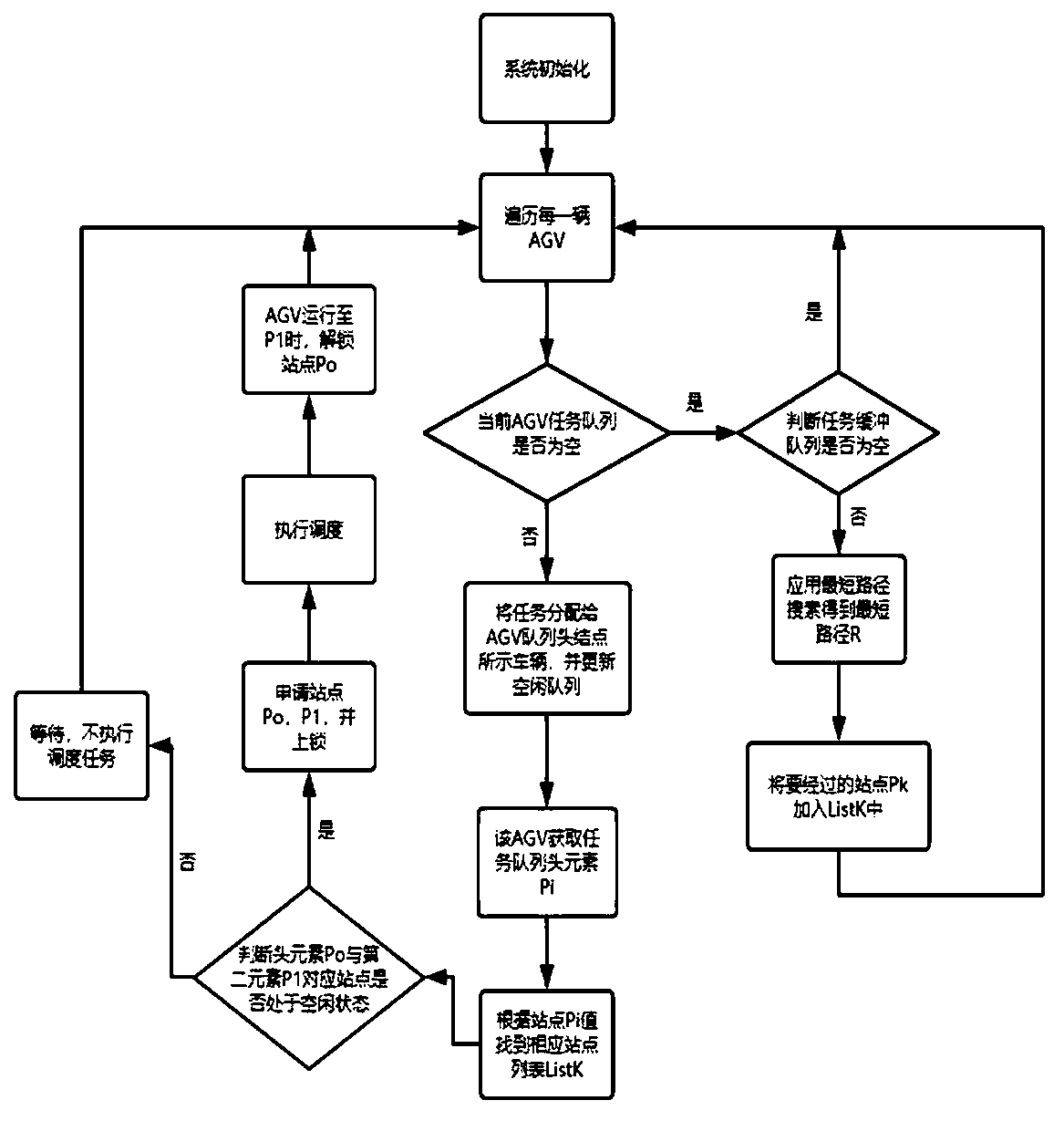
[0035] Such as figure 1 As shown, the present embodiment provides a multi-AGV real-time scheduling algorithm based on one-way track, comprising the following steps:
[0036] Step S1: use graph theory to mathematically model the operating environment of multiple AGVs;
[0037] Step S2: Initialize the AGV trolley list, map and station list respectively;
[0038] Step S3: traverse each AGV in step S2;
[0039] Step S4: Determine whether the AGV task queue is empty, and if the AGV task queue is not empty through the scheduling system detection, then perform step S5; if the AGV task queue is empty, continue to judge whether the task buffer queue is empty; if the task buffer queue is Empty, then return to step S3, if the task buffer queue is not empty, then apply the shortest path search to obtain the shortest path R, and at the same time, the station P th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More