

Crawler chassis winch suction dredging robot with self-rescue function
A crawler chassis and robot technology, applied in the field of robots, can solve problems such as endangering the safety of the main trunk canal, and achieve the effects of good dredging effect, small disturbance and high safety performance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0035] This embodiment provides a crawler chassis winch-suction underwater dredging robot with a self-rescue function, which can realize underwater harmless, continuous moving and rapid dredging. The dredging robot has two application environments, as follows:
[0036] The first type: the artificial river is an open channel, straight, the water flows down the river, the cross section of the water flow is an inverted trapezoid, and the water quality is relatively clear; sometimes it also passes through bridges or dark holes across the river. Underwater equipment is needed to clear river silt and remove obstacles (stones or branches, braids).
[0037] The second type: The artificial river itself is an inverted trapezoidal culvert that crosses the open channel and is under the open channel. When it is full of water, the water flow section is square. It is usually called a channel-crossing culvert, and the river is turbid. All internal dimensions of the channel-crossing culvert i...
Embodiment 2
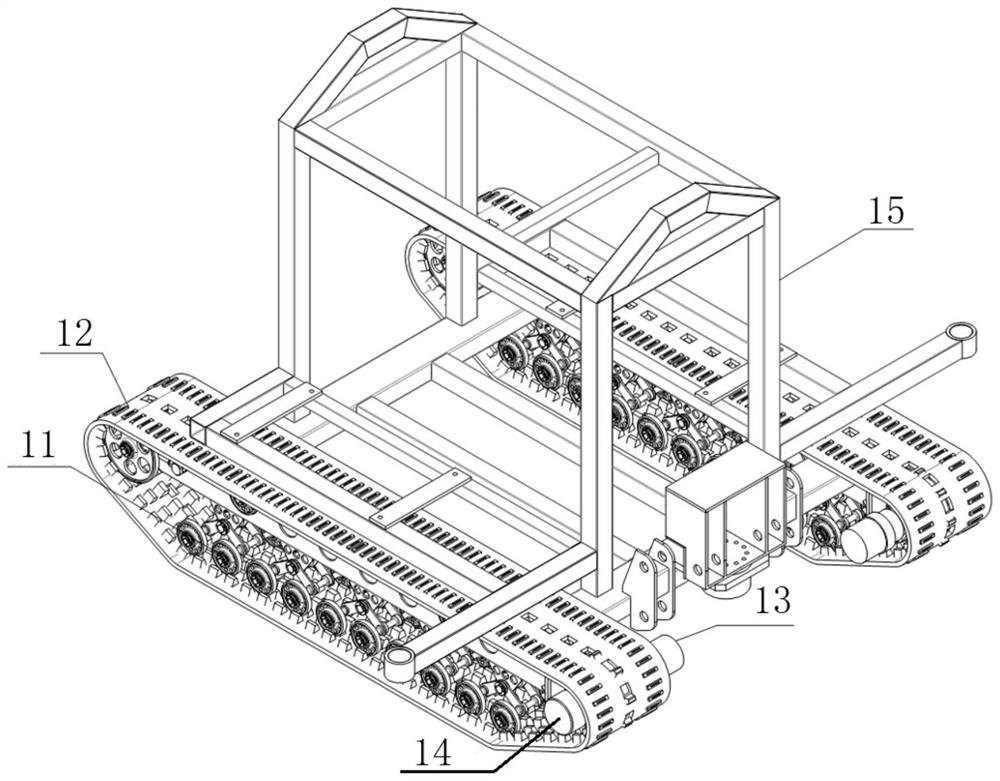
[0052] Such as Figure 12 As shown, in order to prevent the whole vehicle of the underwater dredging robot from crashing into the wall in the culvert, an anti-collision guide device is provided on the platform frame 15, and the anti-collision guide device: includes anti-collision wheels symmetrically arranged on the left and right sides of the platform frame 15 group, the rubber wheel group on each side includes four anti-collision wheels 47 distributed in a rectangular shape in the vertical plane, the axis of the anti-collision wheels 47 is along the vertical direction, and the specific installation method is: one end of the support frame 46 and the platform frame 15 The other end is connected with the rotating shaft 48 through the bearing, and the anti-collision wheel 47 is sleeved on the outside of the rotating shaft through the bearing. The main function of the anti-collision guide device is to prevent the whole vehicle of the underwater dredging robot from crashing into t...
Embodiment 3
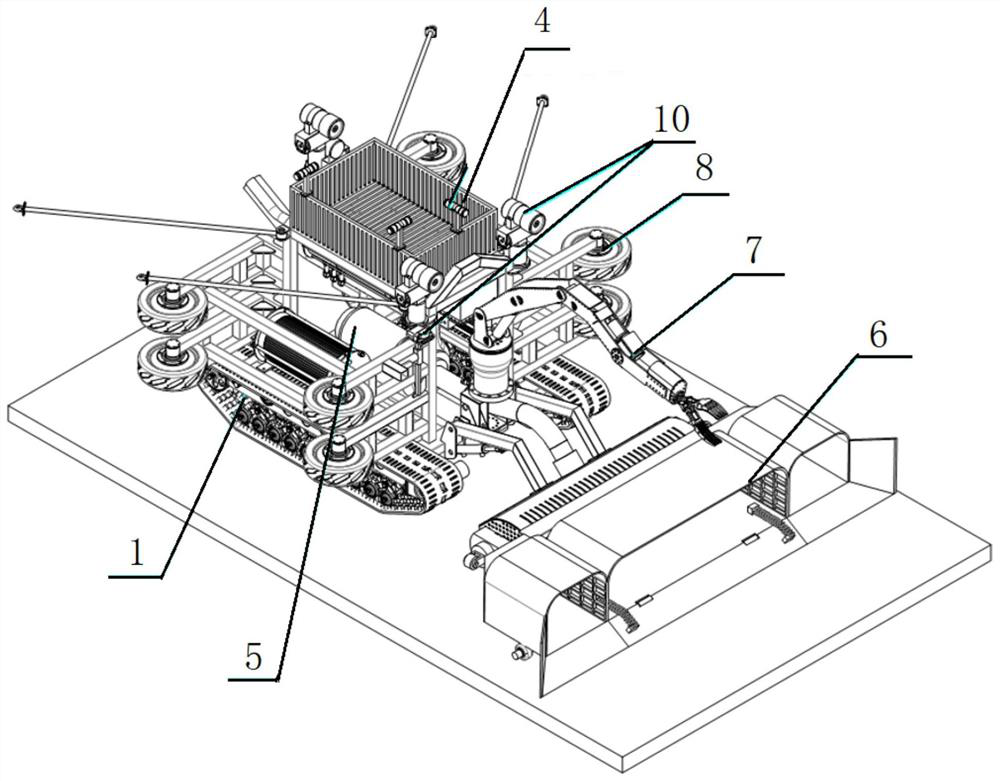
[0054]On the basis of the above-mentioned embodiment 1 and embodiment 2, in the sludge suction mechanism 6, two extension springs 23 are arranged side by side between the middle collection cover 19 and the collection port 24, and one end of the extension spring 23 is connected with the middle collection cover 19. The extension spring support on the bottom surface links to each other, and the other end links to each other with the extension spring support on the surface of the collection port 24. During the process of collecting mud by the mud suction mechanism 6, the collection port 24 is under the action of external force (in this program, through the desilting mechanism five Axle manipulator 45 applies downward active force to the support plate that is arranged on collecting port 24 left and right sides) and opens, and extension spring 23 is in elongated state now; Shaft mechanical arm 45 is unclamped), and the collection port 24 is closed under the action of extension spring...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More