

Industrial robot kinematics calibration system and calibration method
A technology of robot kinematics and calibration system, which is applied in industrial robot kinematics calibration system and calibration field, and can solve problems such as calibration, unusable work site, and high price
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0052] The present invention will be further explained in detail below in conjunction with the drawings and specific embodiments, but it should be understood that the protection scope of the present invention is not limited by the specific embodiments.
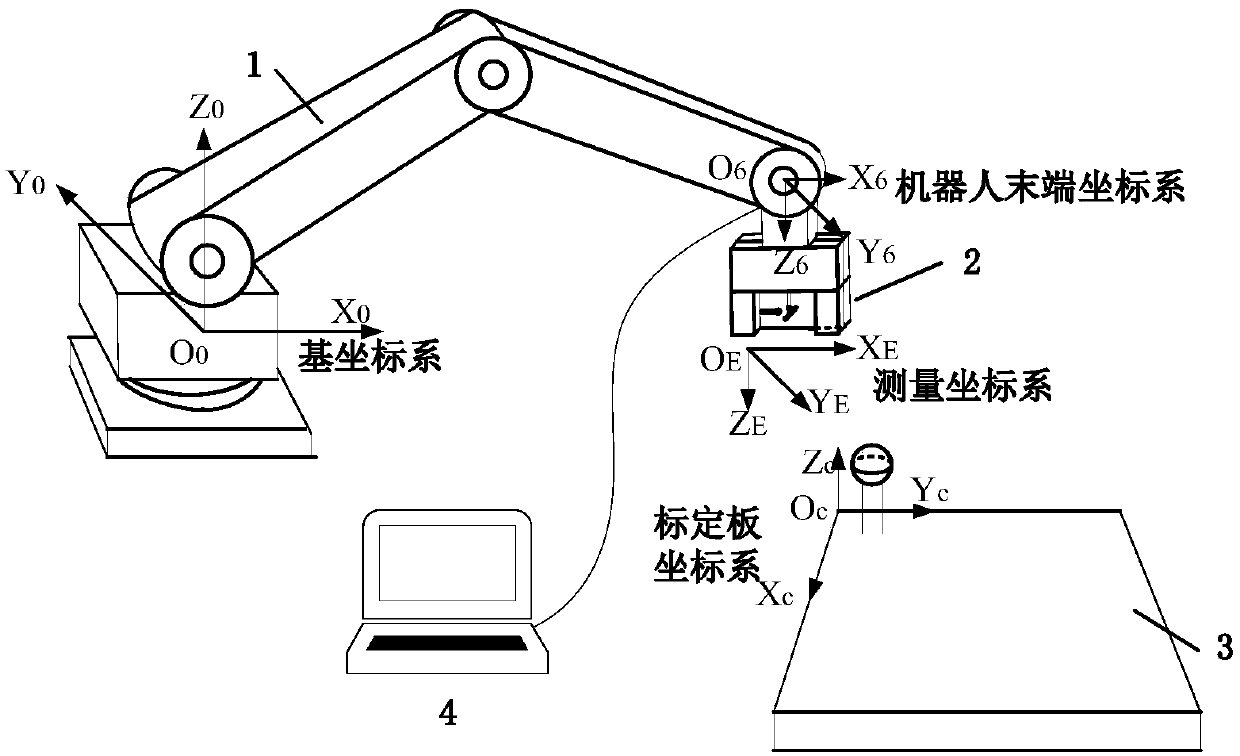
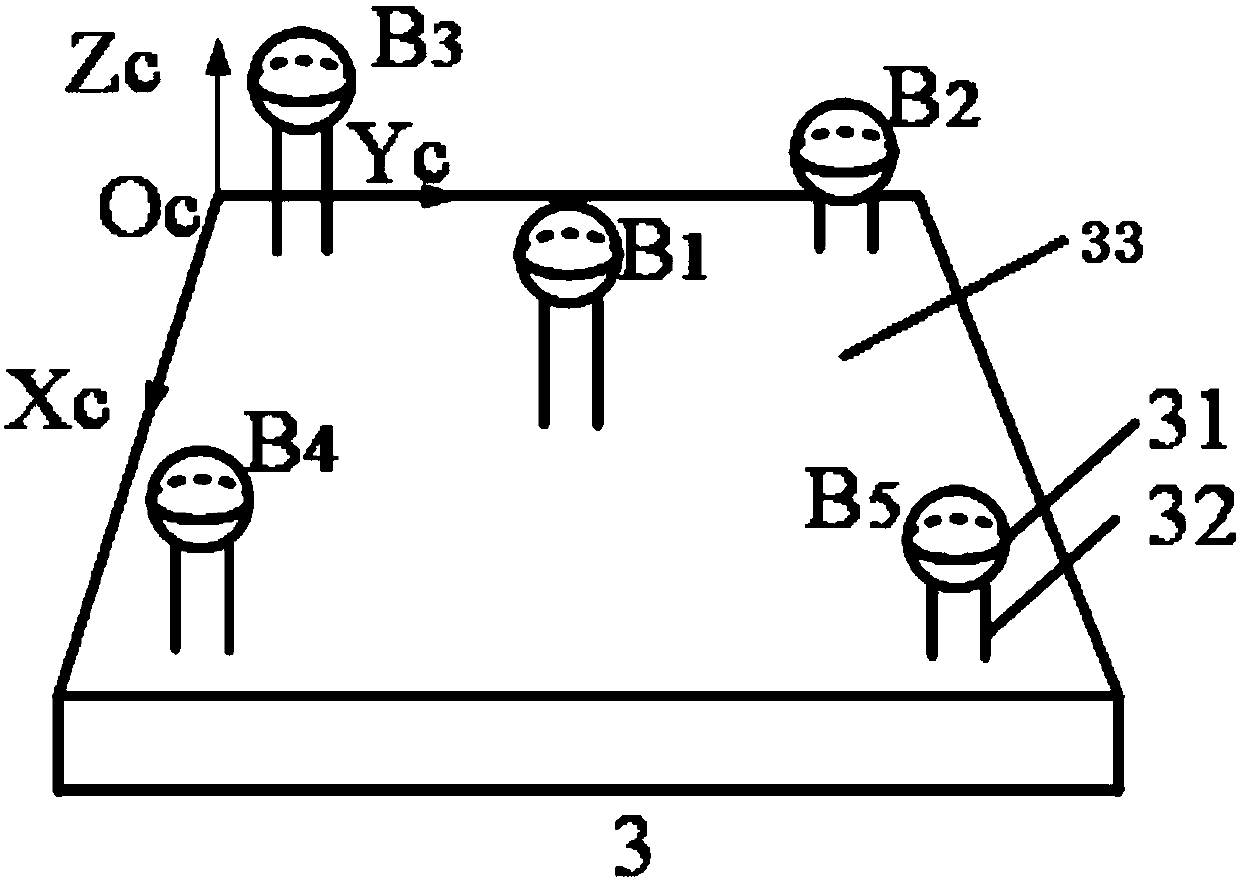
[0053] Such as figure 1 As shown, the present invention provides an industrial robot kinematics calibration system based on a displacement sensor 22, which includes a measuring device 2, a calibration device 3, and a data processing device 4. Such as figure 1 As shown, the measuring device 2 is installed on the flange at the end of the robot 1, and the calibration device 3 is placed in the working space of the robot 1.
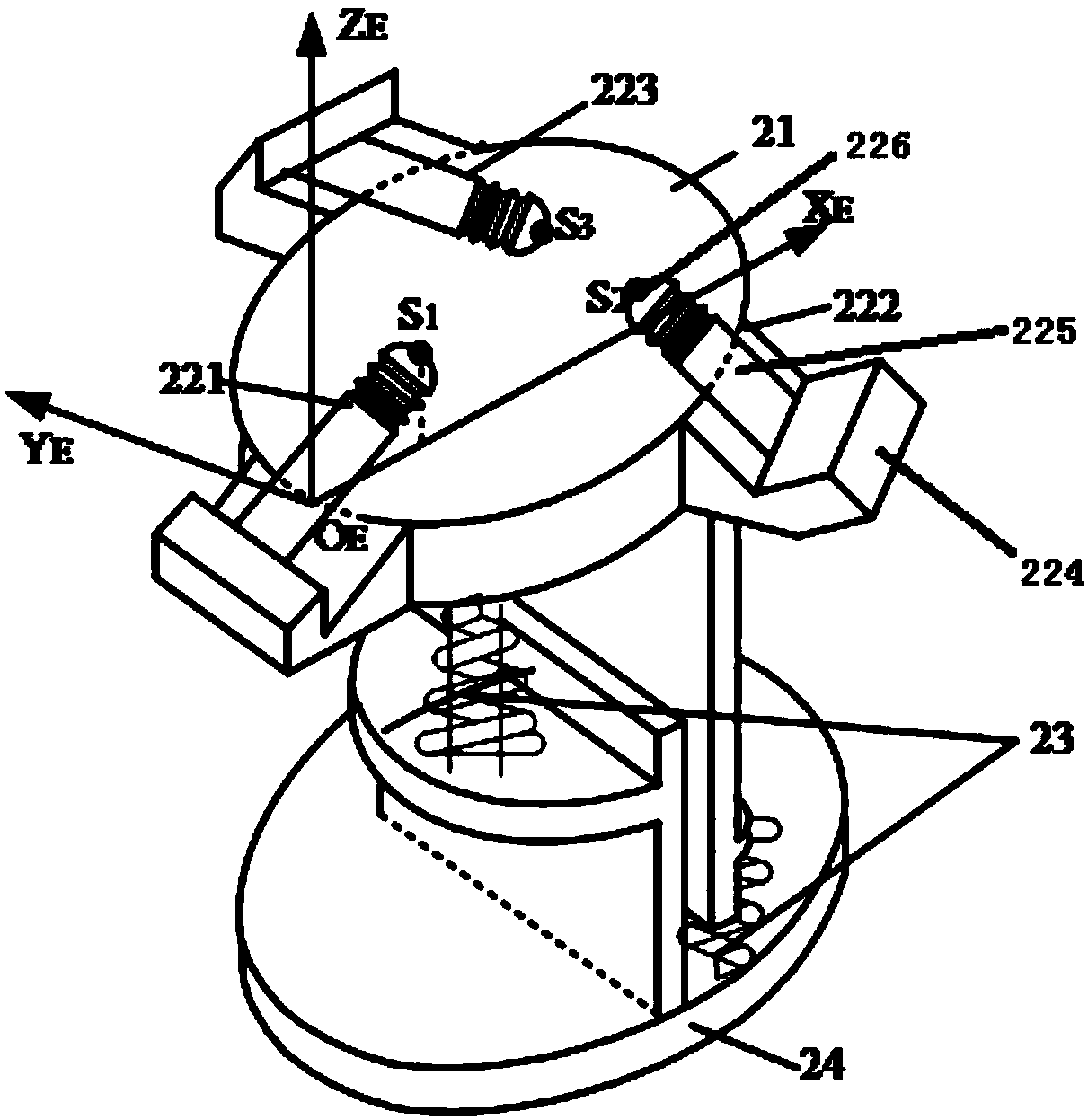
[0054] Such as figure 2 As shown, the measuring device 2 includes a high-precision processing plane 21, a number of displacement sensors 22 fixed at an angle with the high-precision processing plane 21, a mounting mechanism 24 for connecting the end flange of the robot 1, and a displacement sensor 22 and processi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More