

An out-of-bound judgment method and system for a mobile robot
A technology of mobile robots and determination methods, which is applied in the field of mobile robots, can solve the problems that mobile robots cannot effectively locate maps and build, and achieve real-time interaction, simple calculation, and good real-time performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0033] The preferred embodiments of the present invention will be described below in conjunction with the accompanying drawings. It should be understood that the preferred embodiments described here are only used to illustrate and explain the present invention, and are not used to limit the present invention.
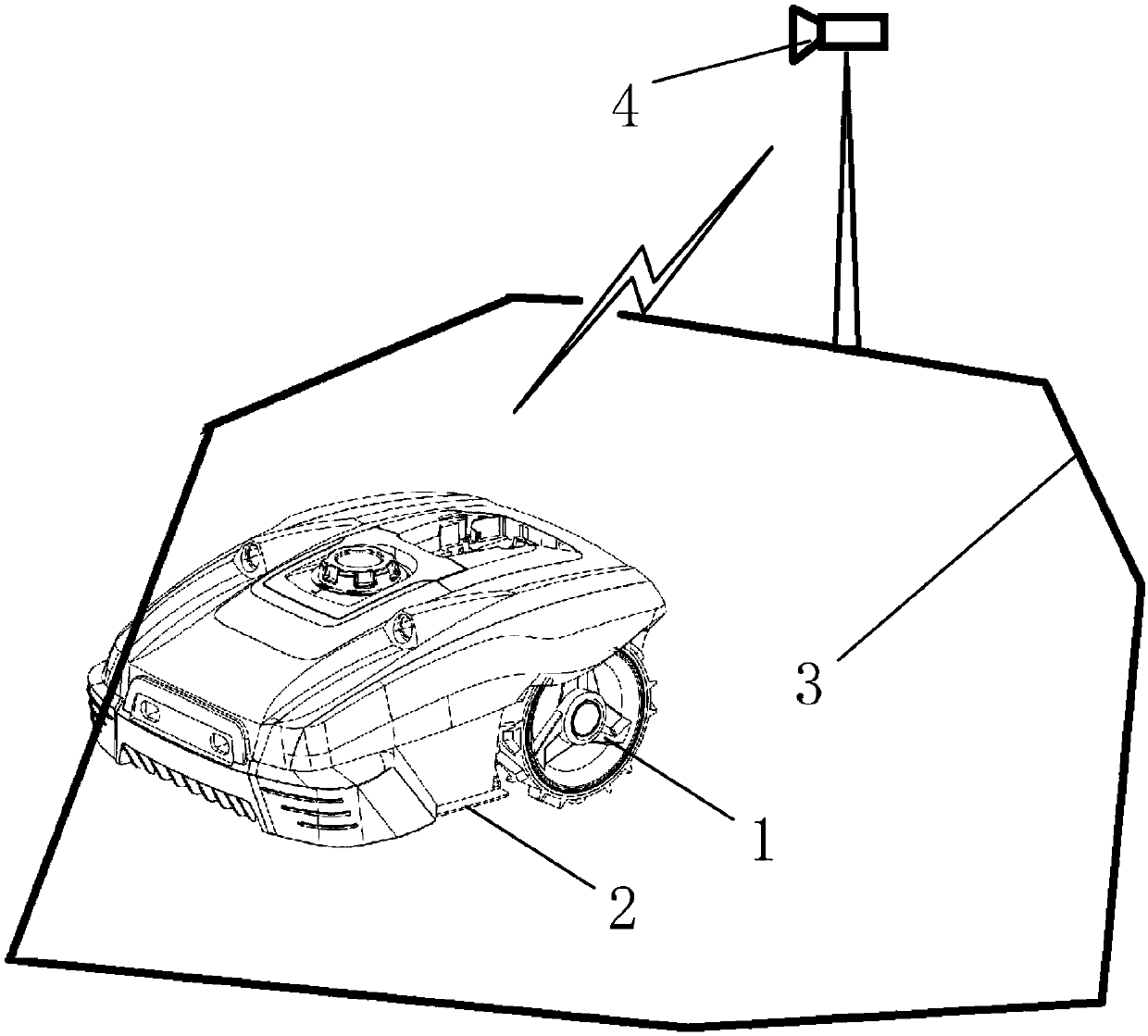
[0034] figure 1 Shown is a mobile robot applying the present invention, which includes a self-propelled unit 1, a communication unit, and a working device 2. In order to realize the control of the mobile robot, the present invention is also provided with an image acquisition device 4 above its working area 3 to constitute a control system for the mobile robot. Wherein, the mobile robot may be a lawn mower robot or other robots with a self-propelled function for outdoor environments. The lawn mower robot can also be provided with a map construction unit and a path planning unit, which are used to construct a map of the work area of the lawn mower robot according to the im...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More