

A point cloud misregistration filtering method and system for three-dimensional measurement of complex special-shaped surface robot
A technology of 3D point cloud and robot, which is applied in the fields of instruments, 3D image processing, image analysis, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0033] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
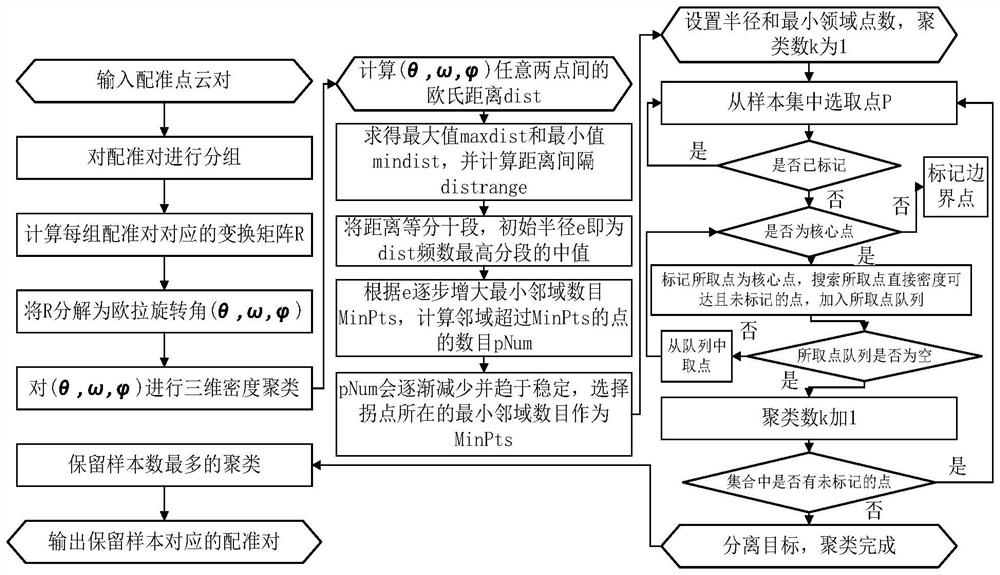
[0034] Using the robot mobile platform equipped with a 3D scanning device at the end, it will scan the complex special-shaped surface target from multiple directions, collect 3D image information, calculate the registration points for feature matching through the computer, and use the point cloud error of the complex special-shaped surface robot 3D measurement The registration filtering method filters out incorrect registration results and obtains correct matching results.
[0035] The 3D target is a blade with a special-shaped curved surface. The special-shaped curved surface refers to a non-standardized complex surface structure. The similarity of the local depth image is high, and the surface model contains high-order nonlinear functions that are difficult to fit. The registration accuracy of multiple 3D point cloud depth images is difficult to guara...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More