

Remote control method and device of robot and terminal equipment
A remote control and robot technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve problems such as poor flexibility, unhumanized operation, and failure to satisfy users, and achieve the effect of improving flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
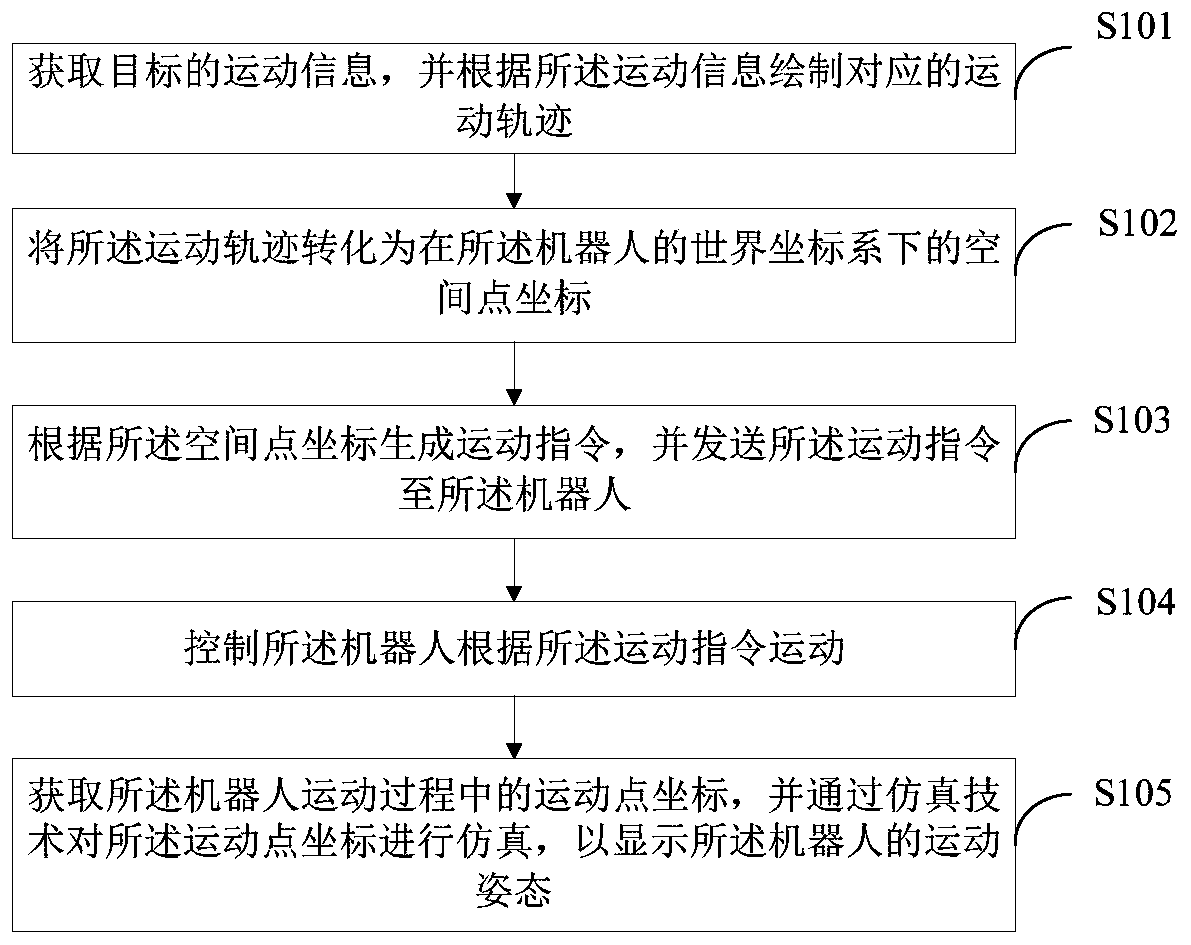
[0040] like figure 1 As shown, this embodiment provides a remote control method for a robot, which can be applied to terminal devices such as mobile phones, PCs, and tablet computers. The remote control method of the robot provided in this embodiment includes:
[0041] S101. Acquire motion information of a target, and draw a corresponding motion trajectory according to the motion information.
[0042] In a specific application, the motion information of the target is obtained through the recognition device, and the corresponding motion trajectory is drawn according to the motion information. Wherein, the recognition device includes but not limited to a motion recognition device and a gesture recognition device; that is, different types of motion information can be acquired according to different recognition devices. For example, the motion information of the target may include the motion information of the target in a motion state acquired through the motion of the target we...
Embodiment 2
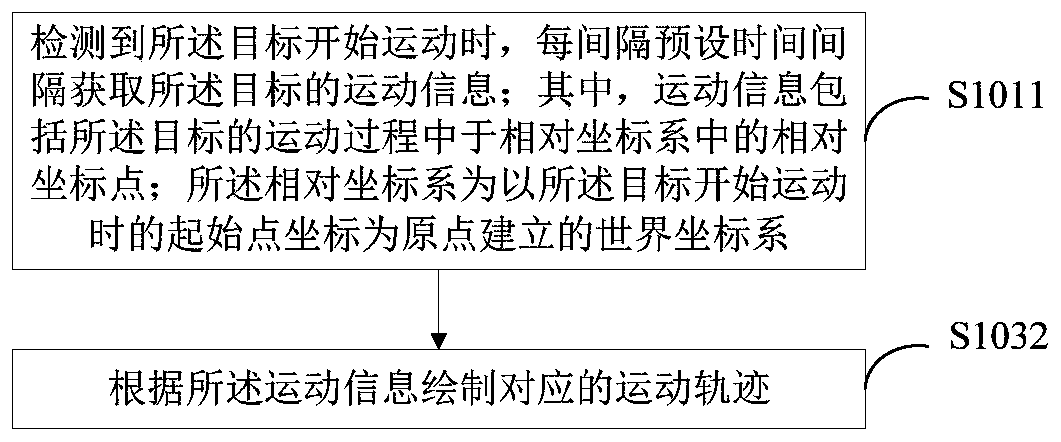
[0053] like figure 2As shown, this embodiment is a further description of the method steps in the first embodiment. In this embodiment, step S101 includes
[0054] S1011. When it is detected that the target starts to move, acquire the motion information of the target every preset time interval; wherein, the motion information includes the relative coordinate points in the relative coordinate system during the motion of the target; the relative The coordinate system is a world coordinate system established with the coordinates of the starting point when the target starts to move as the origin.
[0055] In a specific application, if it is detected that the target starts to move, the operation of acquiring the real-time motion information of the target is repeated multiple times according to the preset time interval until the target's motion ends. Among them, the motion information includes the relative coordinate points of the target in the relative coordinate system during t...
Embodiment 3
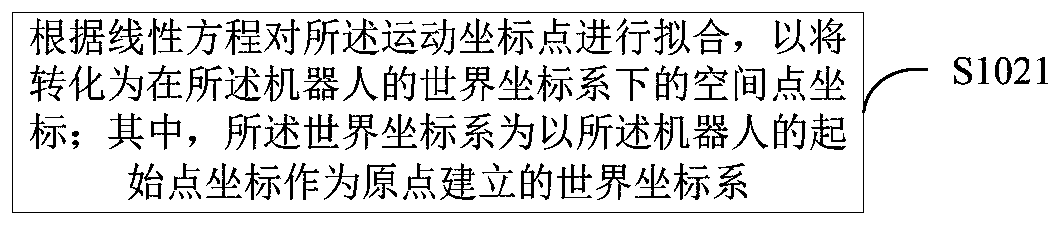
[0060] like image 3 As shown, this embodiment is a further description of the method steps in the first embodiment. In this embodiment, step S102 includes:
[0061] S1021. Fit the motion coordinate points according to a linear equation, so as to transform them into space point coordinates in the world coordinate system of the robot; wherein, the world coordinate system is based on the starting point coordinates of the robot as The world coordinate system established by the origin.
[0062] In a specific application, the motion coordinate points in the motion information are fitted according to the linear equation, so as to transform the motion coordinate points into space point coordinates in the robot's world coordinate system. Wherein, the world coordinate system refers to the world coordinate system established with the starting point coordinates of the robot as the origin. The starting point coordinates of the robot are the point coordinates when the robot obtains the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More