

Man-machine collaboration robot grabbing system and work method thereof
A technology of human-machine collaboration and working methods, applied in the field of robotics, can solve the problems of high professional requirements and waste of time for operators, and achieve the effect of reducing professional skill requirements and smooth and compliant trajectory
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
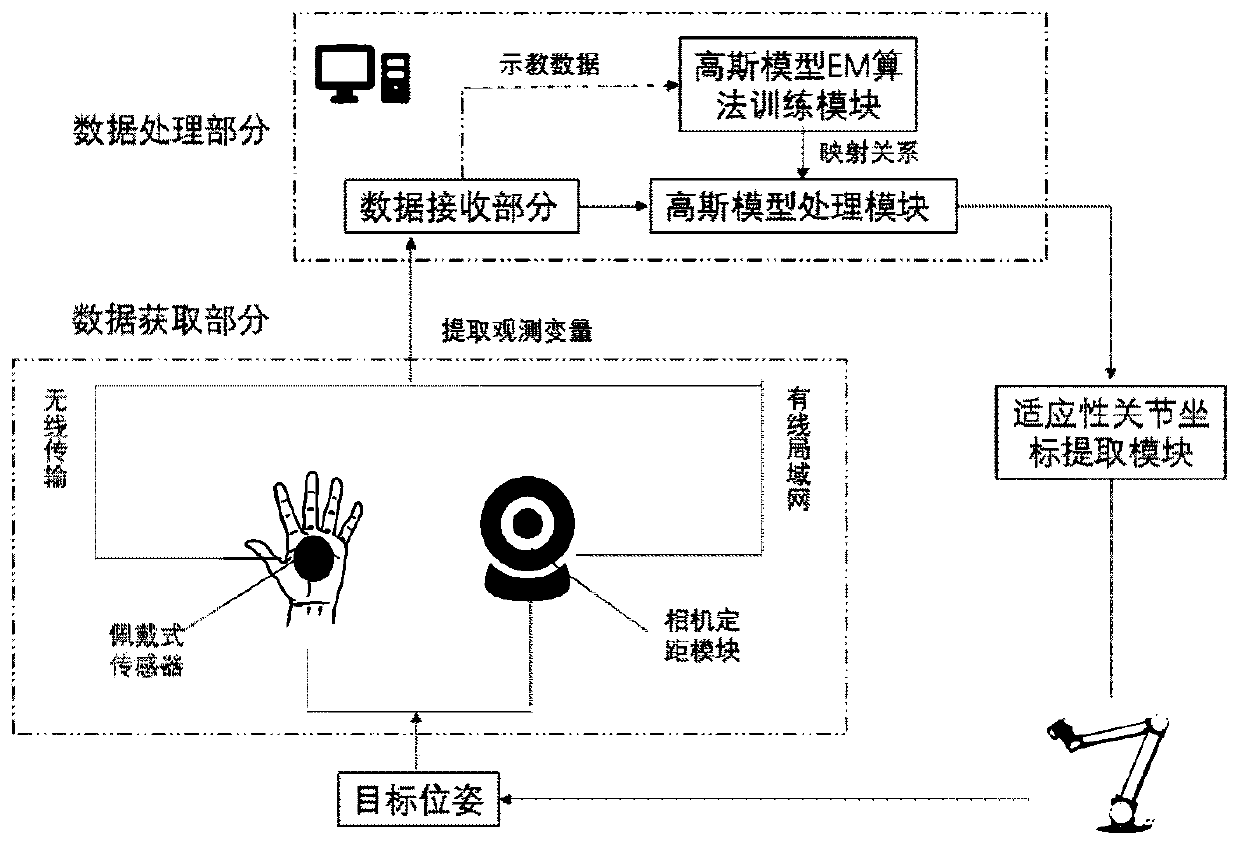
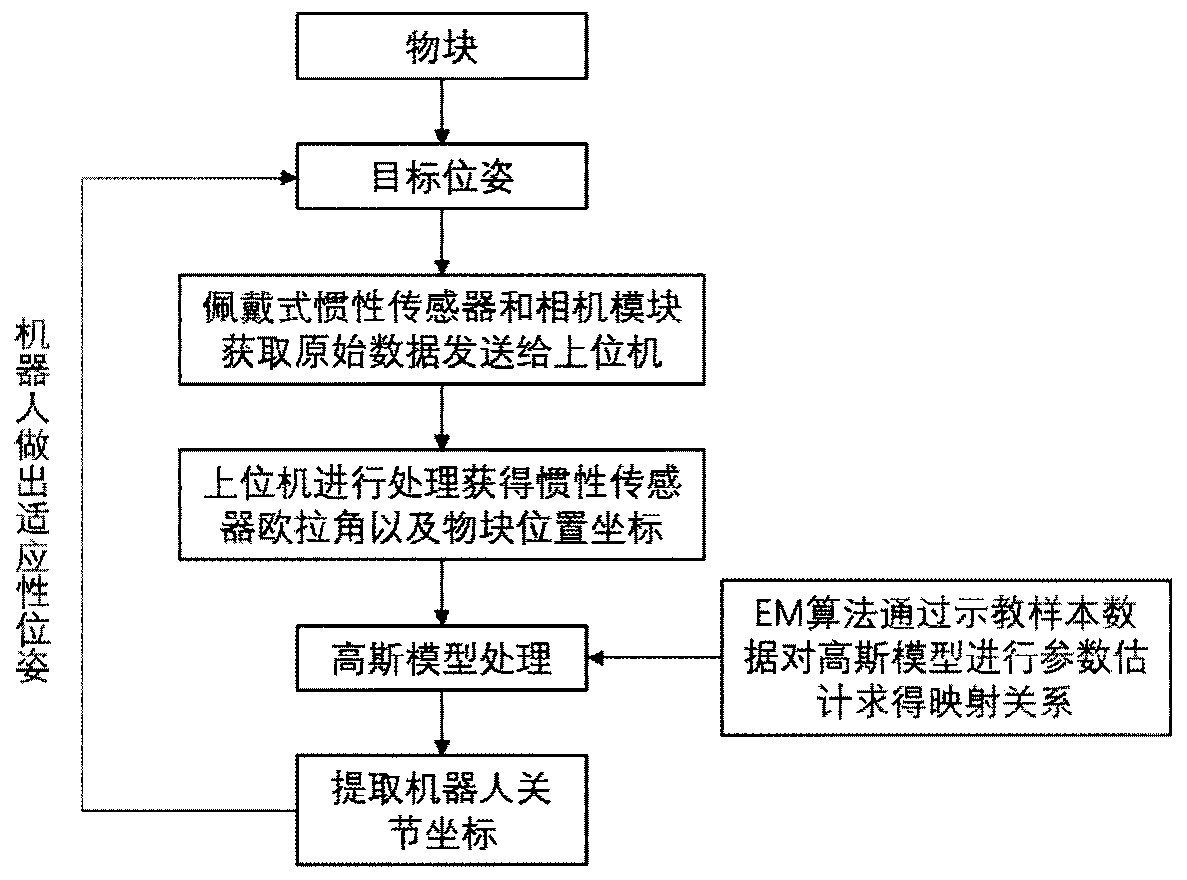
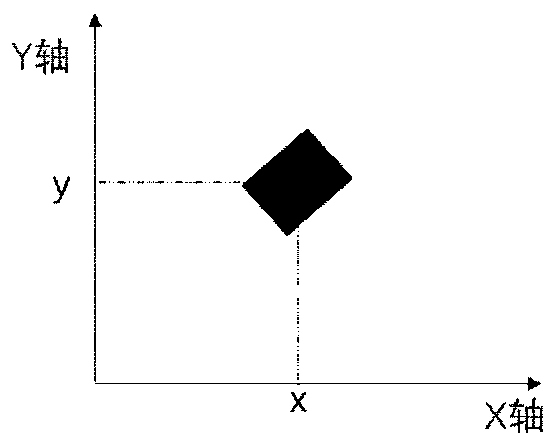
[0052] figure 1 It is a schematic structural diagram of a human-machine collaborative robot grasping system provided in Embodiment 1 of the present invention. Such as figure 1 As shown, the human-machine collaborative robot grasping system provided in this embodiment includes a wearable inertial sensor module, a camera distance determination module, a Gaussian model EM algorithm training module, a Gaussian model processing module, an adaptive robot joint coordinate extraction module, and a wearable inertial sensor module. The sensor module extracts the attitude variable of the operator grabbing the object, the camera distance module extracts the coordinates of the edge points of the object, and obtains the average value of the coordinates as the coordinates (x, y) of the center point of the target object. The Gaussian model EM algorithm training module uses the teaching data Estimate the parameters of the Gaussian model to form the mapping relationship between the object obse...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More