

A radar beam decoupling method for a moving platform
A motion platform and radar beam technology, applied in the field of radar beam decoupling, can solve problems such as gimbal lock, increase computational complexity, and loss of decoupling ability, so as to reduce complexity, realize simple calculation, and reduce calculation amount Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The technical solution of the present invention will be described in detail below in conjunction with the accompanying drawings.
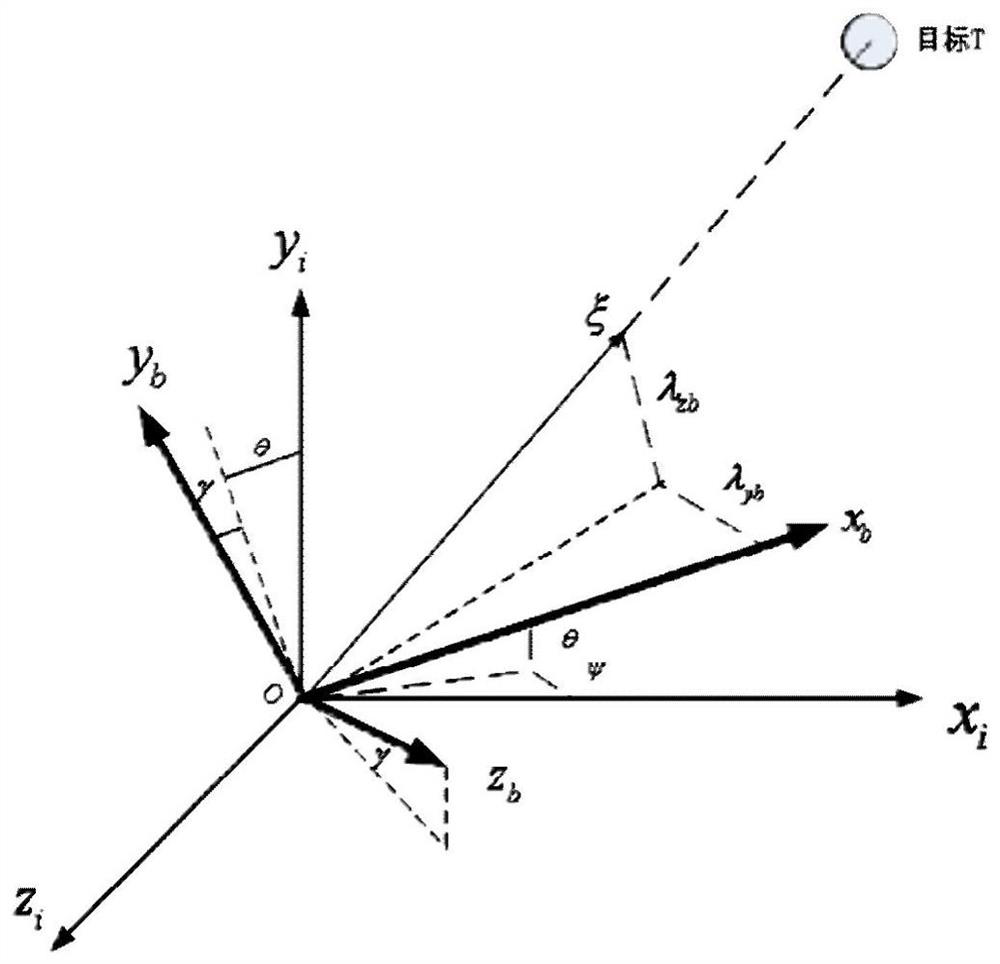
[0034] The coordinate system mentioned in the present invention is defined as follows:
[0035] Such as figure 1 As shown, the inertial coordinate system in the present invention takes the radar center of mass O as the origin, and x i pointing due north, y i Pointing to the sky, z is determined according to the right-hand rule i . The carrier coordinate system is a coordinate system obtained by rotating the inertial coordinate system according to the three attitude angles of the radar's pitch, yaw and roll.
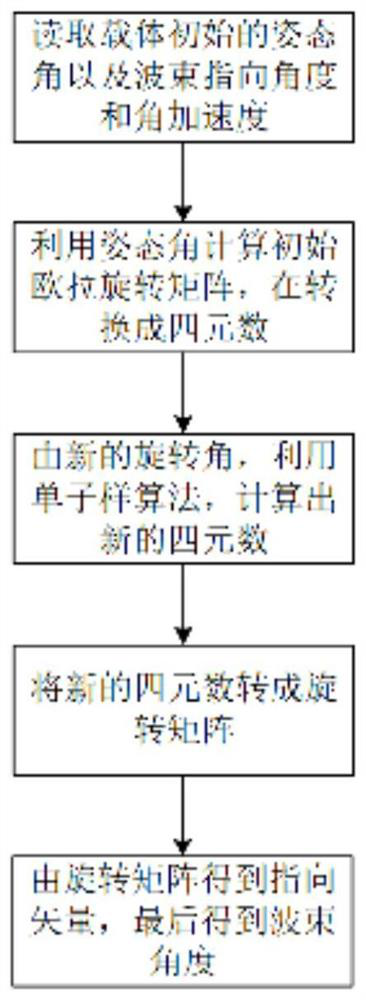
[0036] Such as figure 2 As shown, the moving platform radar beam decoupling method disclosed in the present invention includes the following steps:
[0037] Step 1: Obtain the three attitude angles of the motion platform in the inertial coordinates under the initial conditions: pitch angle θ, yaw angle ψ, roll angle γ, the azimut...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More