

Robot joint jointly driven by double brushless direct current motors connected in parallel and control method thereof
A brushed DC motor, robot joint technology, applied in multiple motor speed/torque control, electric components, manipulators, etc., can solve the problems of slow movement speed and high ground requirements, achieve large instantaneous explosive force, easy maintenance, system Highly integrated effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The technical scheme of the present application is described in detail below in conjunction with accompanying drawing:
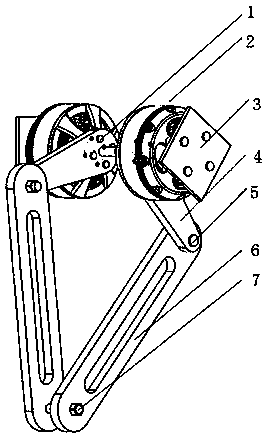
[0021] Such as figure 1 As shown, a robot joint driven by double brushless DC motors in parallel includes two long connecting rods 6, one end of the two long connecting rods 6 is connected by a fixed screw 7, and the other end is fixed to one end of the short connecting rod 4 respectively. The bolts 5 are connected, the other end of each short connecting rod 4 is connected with a brushless DC motor 2, the outer end surface of each brushless DC motor 2 is fixed with a motor driver 3, and a connecting rod is arranged between the two brushless DC motors 2 1.
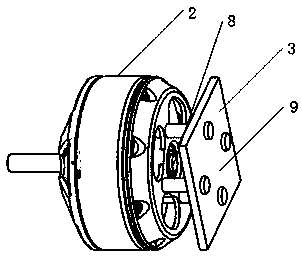
[0022] Such as figure 2 As shown, the bearing of the brushless DC motor 2 of the present application absorbs the magnetic steel 8 near the end of the motor driver 3 , and the motor driver 3 is provided with a magnetic encoder 9 .
[0023] Such as figure 2 As shown, the magnetic encoder 9 of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More