

A Radially Variable Three-Drive Spherical Robot with Dual Control Modes
A spherical robot, dual control technology, applied in the direction of motor vehicles, vehicle parts, body stability, etc., can solve the problems of increased cost, complex structure, increased control difficulty, etc., to achieve the effect of ensuring balance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
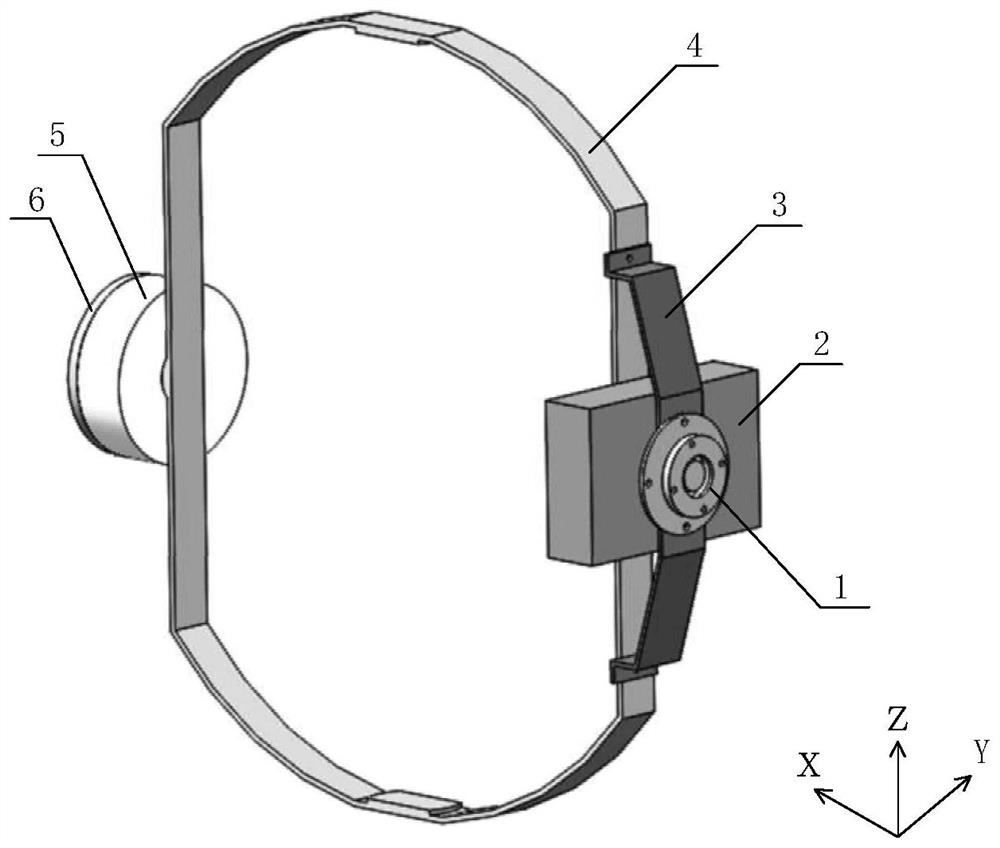
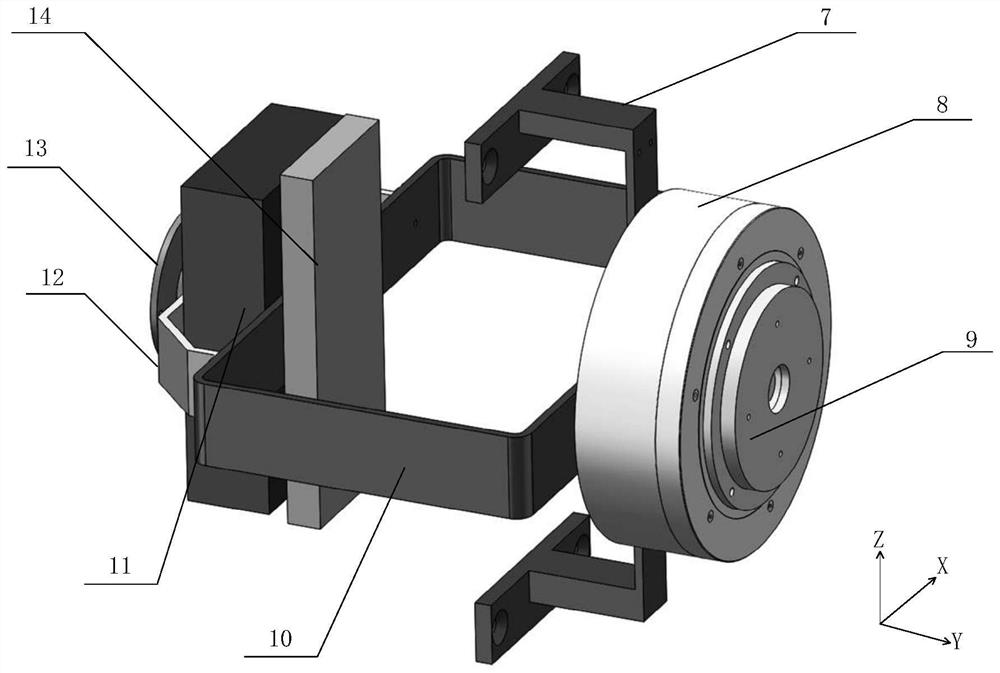
[0036] A radially variable three-drive spherical robot with a double control mode, including a spherical shell, drive motors in three directions, a battery system matching each drive motor, a heavy swing, and a heavy swing lifting system. Such as figure 1 As shown, the installation positions of the X-axis motor and its battery system are respectively located on both sides of the outer surface of the X-axis frame, and the stator 5 of the X-axis motor and its battery mounting frame 3 are connected to the outer surface of the X-axis frame 4, and the outer surface of the X-axis battery mounting frame 3 Connect with X frame bearing housing 1; as figure 2 As shown, the Y frame is composed of the Y frame main frame 10 and the Y frame auxiliary frame 7. The installation positions of the Y axis motor and its battery system are respectively located on both sides of the outer surface of the Y frame main frame 10, and the Y axis motor stator 8 and its battery are installed Frames 12 are...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More